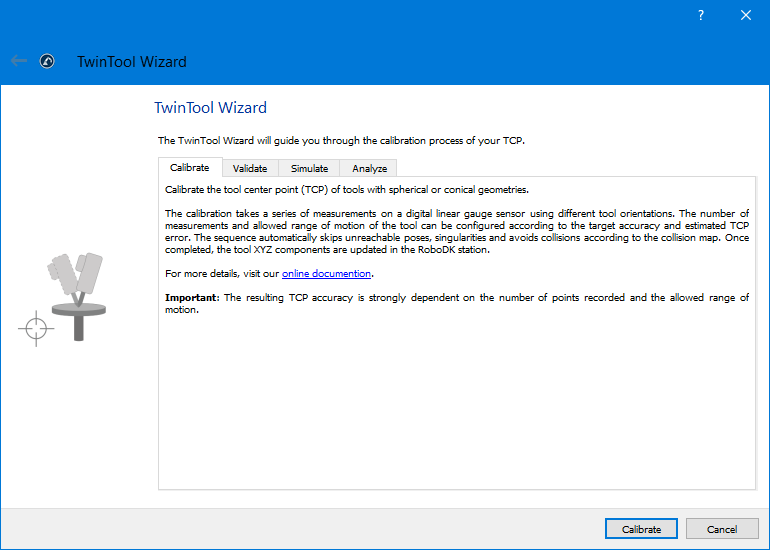
キャリブレーション・ウィザード
キャリブレーション手順を開始するには、TwinTool➔
ウィザードを起動すると、


重要:接続されたロボットで較正を行う前に、少なくとも一度はシミュレーションモードで較正シーケンスを実行することをお勧めします。
重要:シミュレートされたシーケンスは、キャリブレーションや検証に使用された実際のシーケンスと一致しない場合があります。ロボット経路は自動的に調整されます。
ヒント:センサ上のロボット位置のジョイントターゲットを「Calib Target」以外の名前で保存します。これを再利用すれば、ロボットを素早く元の位置に戻すことができます。
ヒント:TCPの推定値がすでにある場合は、工具誤差の推定値を5mm以下に設定してください。こうすることで、較正手順が速くなります。
ヒントロボットの可動域を変更するには、ZとXYの関節範囲を変更します。