RoboDK ツインツール
イントロダクション
RoboDKツインツールキャリブレーションを使えば、ツールセンターポイント(TCP)を自動的にキャリブレーションすることができます。産業用ロボットは高い再現性を持っていますが、精度は高くありません。そのため、産業用ロボットの精度はロボットとツールのキャリブレーションによって向上させることができます。キャリブレーションを行わないと、ロボットの精度はロボットのブランドやモデルに大きく依存します。

RoboDK TwinTool は、ツールセンターポイント (TCP) のキャリブレーションと検証に使用できます。TwinToolは、球面または円錐形状のツールのTCPを正確に較正することができます。
1.球面工具➔工具の中心は校正されています。
2.円錐形工具➔工具の先端は校正されています。
要件
自動ツールキャリブレーションを行うには、RoboDK TwinToolアプリをインストールし、互換性のあるセンサーを用意する必要があります。
以下のものをご用意ください:
1.1つまたは複数のロボットアーム。
2.互換性のあるダイヤルゲージ(LVDTまたはリニアゲージとも呼ばれます)。
3.RoboDKソフトウェアがインストールされ、自動ロボットキャリブレーション用の適切なライセンスが利用可能である必要があります。
4.ロボットコントローラには互換性のあるロボットドライバが必要です。
5.RoboDK TwinToolアプリをインストールします:
a.RoboDK TwinTool アプリのダウンロード (ダウンロードリンクはRoboDKにお問い合わせください)
b.ファイルをダブルクリックしてアプリをインストールし、RoboDKで開きます。
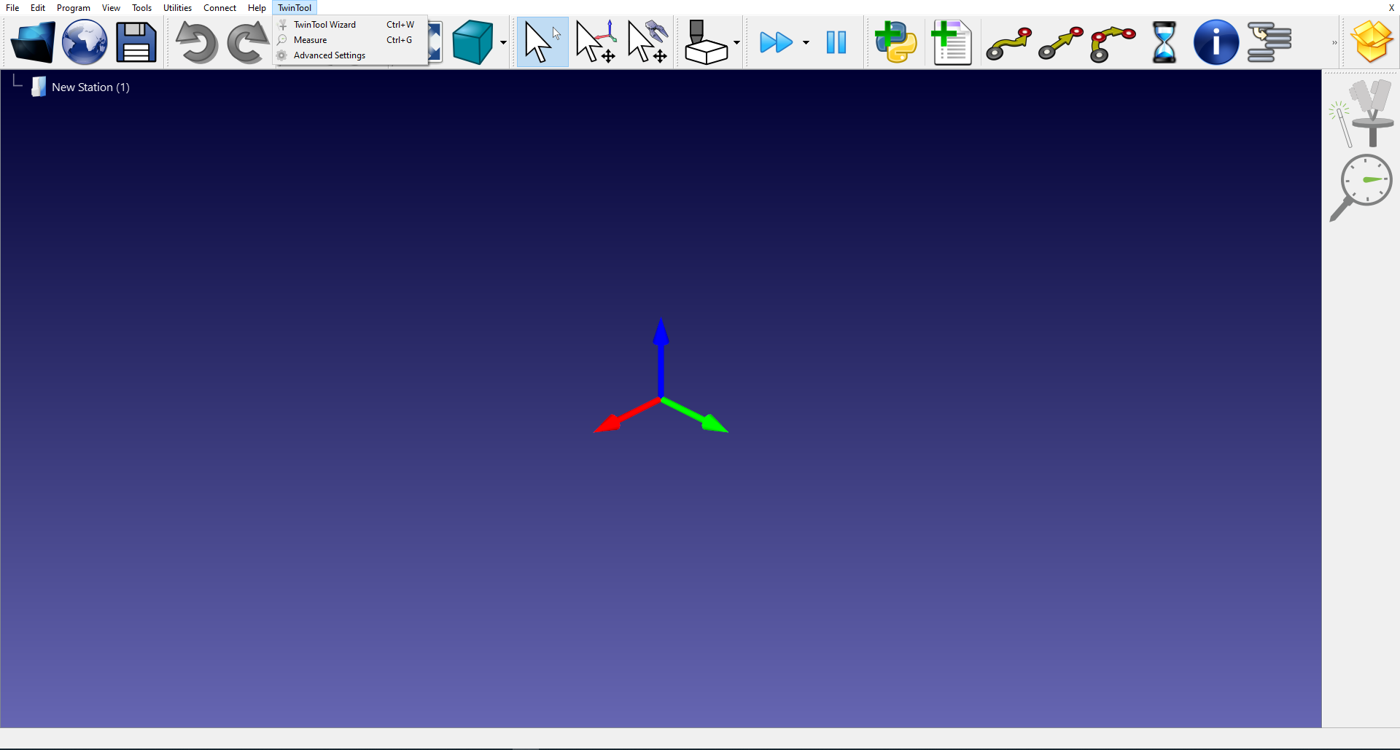
c.Tools➔ Apps を選択し、TwinToolをダブルクリックするとTwinToolツールバーとメニューが表示されます
TwinToolアプリが表示されない場合は、アプリを正しくインストールするために、一旦RoboDKを終了し、管理者権限で再度RoboDKを起動してください。
注意: RoboDK アプリは App Loader プラグインを有効にする必要があります。このプラグインは rdkp ファイルをダブルクリックすると自動的にロードされます。そうでない場合は、ツール➔ ロードプラグインから App Loader プラグインをロードしてください。
重要: TwinToolアプリは、自動的に依存関係をダウンロードしてインストールするため、アクティブなインターネット接続が必要です。ただし、これらの依存関係を別のコンピュータからダウンロードすることは可能です。
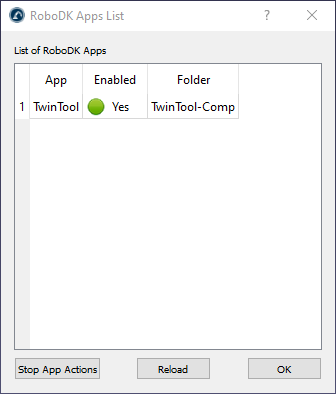
注: TwinToolメニューとツールバーが自動的に表示される場合があります。TwinToolアプリ(または他のアプリ)を表示または非表示にするには、[ツール]➔ [アプリ一覧]を選択し、アプリの[有効]タグをダブルクリックします。
リニアゲージセンサ
RoboDK TwinToolはKeyence、Mitutoyo、Sylvacなどの複数のリニアゲージセンサーをサポートしています。通信プロトコルにはUSB、Ehternet/IP、RS232などがあります。産業グレードのリニアゲージセンサーのおおよその価格は1,500.00ユーロです。
リニアゲージセンサーは、0.005mm以上の精度と10mm以上の移動量を持つことが必要です。測定周波数は 50 サンプル/秒以上を推奨します。このセンサーはRoboDKでは提供、販売しておりません。RoboDK TwinToolを使用するために必要なこのセンサーの供給については、お近くの代理店にお問い合わせいただくことをお勧めします。
以下のリストはキーエンス製リニアゲージのご注文例です:
●キーエンス GT2-P12 - ペンシル型ゲージ
●GT2-UB1 - USB接続ユニット
●OP-87716 - ケーブル延長
●OP-76875 - ゲージ用推奨取り付けブラケット
●M2.5x0.25ネジ付き25mm平型接点が必要(キーエンスからは提供されません)
次のリストは、ミツトヨ製リニアゲージのご注文例です:
●ミツトヨ 542-191 - LG 100ゲージ
●ミツトヨ542-081A - EJカウンタ+AC
●ミツトヨ 21HZA149 - USBインターフェース(RS232にも対応)
●M2.5x0.25ネジ付き25mmフラットコンタクトが必要(ミツトヨでは用意していません)
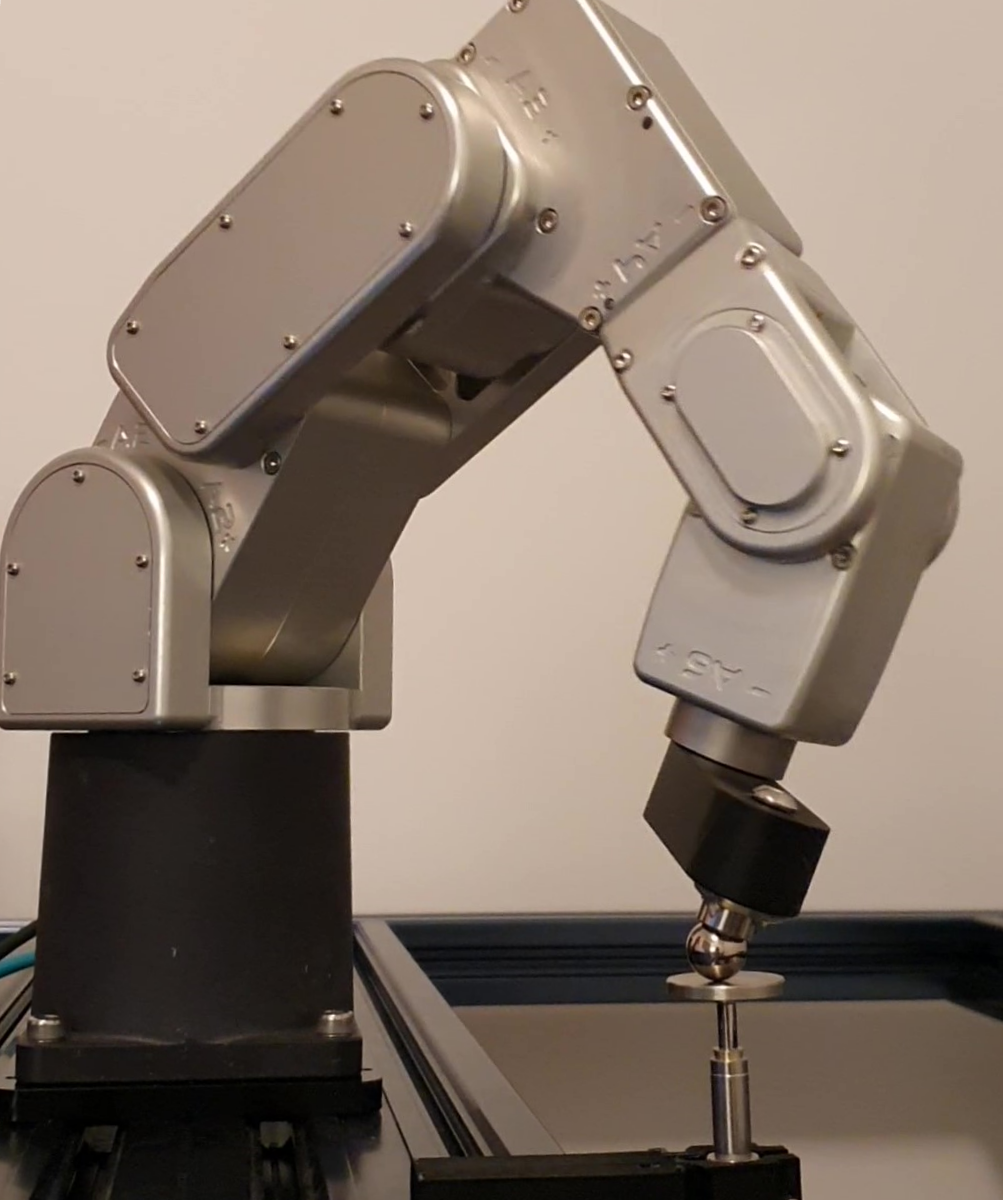
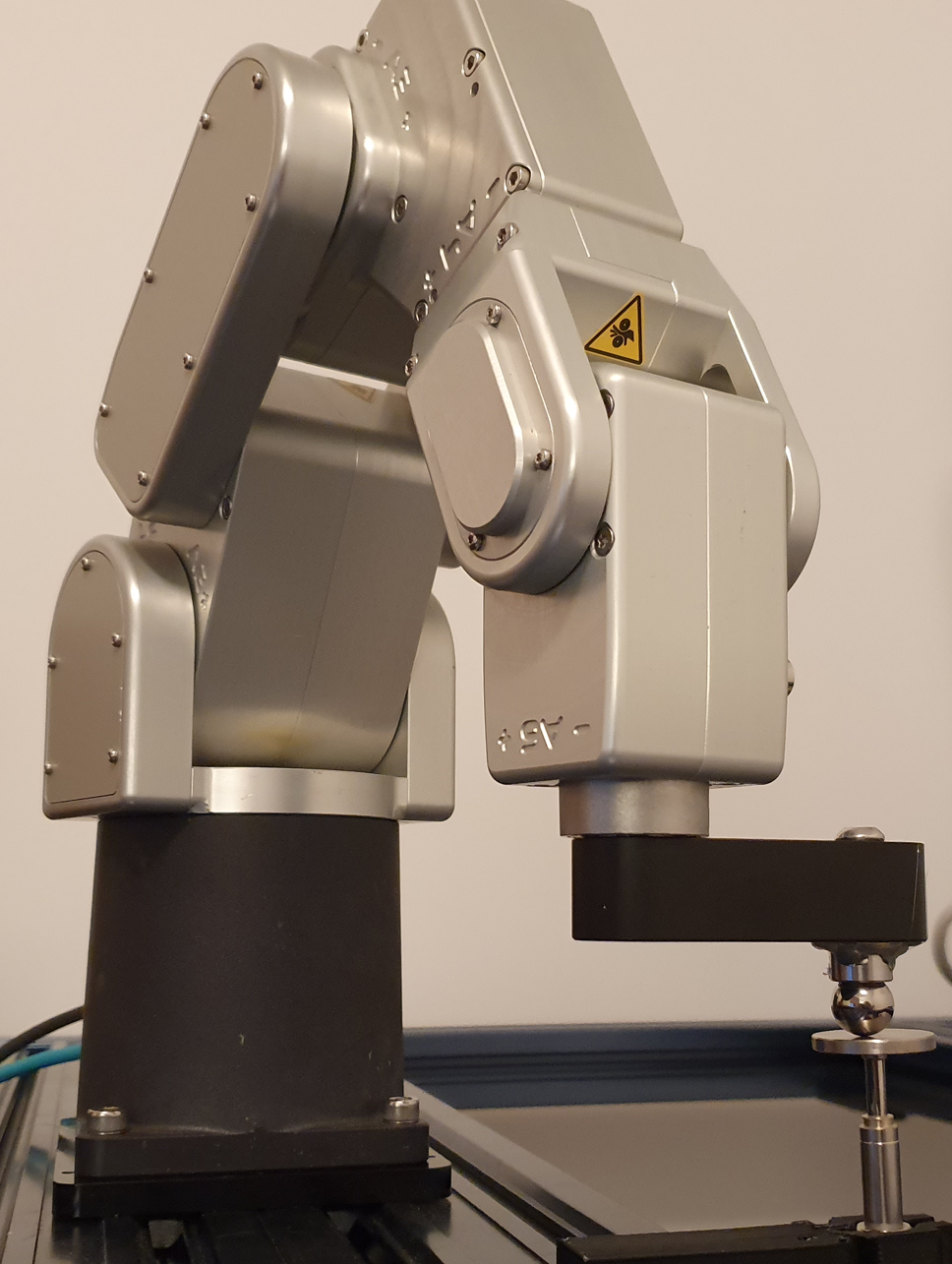
キャリブレーションセットアップ
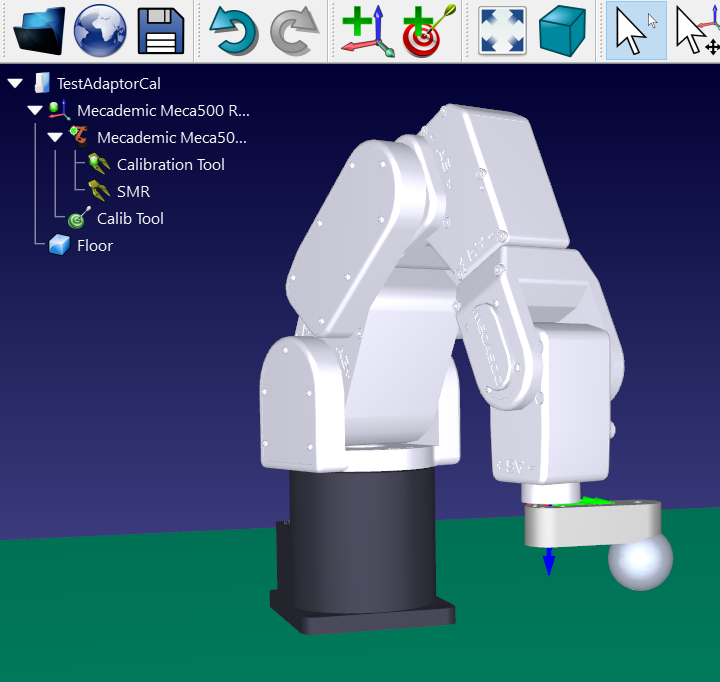
TwinToolを使ってツール(TCP)をキャリブレーションするには、RoboDKでロボットをロードし、センサーとロボットが接続されていることを確認する必要があります。オプションで、オブジェクトやツールの3Dモデルを追加してセルをモデル化することができます。これにより、自動的に衝突を回避することができます。
1.ロボットをロードします:
a.ファイル➔ オンラインライブラリを開く を選択します。オンラインライブラリがRoboDKに表示されます。
b.フィルターを使ってロボットをお探しください。
c.開く」を選択すると、RoboDK ステーションにロボットが自動的にロードされます。
d.あるいは、ライブラリ(https://robodk.com/library)からロボットファイルを直接ダウンロードし、そのファイルをRoboDKで開きます(.robotファイル)。
2.センサーを接続します:
a.センサーをコンピュータに接続します。
b.TwinTool➔
c.センサーが測定中であること、測定値が安定していることを確認してください。
注:すぐにセンサーに接続できない場合は、次のステップで接続設定を編集し、後で使用するために保存することができます。
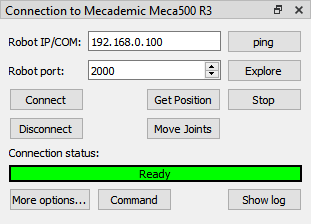
3.ロボットを接続します:
a.接続➔ 接続ロボットを選択します。
b.ロボットのIPとポートを入力してください。
c.接続を選択します。
注:ロボットコントローラによっては、特定のセットアップまたは特定のソフトウェアオプションに従う必要があります。詳しくはロボットドライバーのセクションをご覧ください。
4.ロボット接続パネルから位置取得を選択します。このステップでRoboDKのロボットの位置が更新されます。
カスタマイズセットアップ
オプションで以下のステップを踏んで細胞の3D環境を適切にモデリングすることができます。
1.ツールの3Dモデルを読み込み、RoboDKでツールを作成します。詳細はツールを作成するセクションをご覧ください。
2.任意の3Dファイルを読み込んでセルをモデリングします。3D STEP、IGES、STLファイルを読み込むことができます。詳しくは、使い始めのセクションをご覧ください。
注:衝突を避けるために、セルを適切にモデル化することを強く推奨します。
ヒント: 工具の中心点を正しく推定しておけば、RoboDKでそれを設定し、推定した工具を更新することで、キャリブレーションをより迅速に行うことができます。
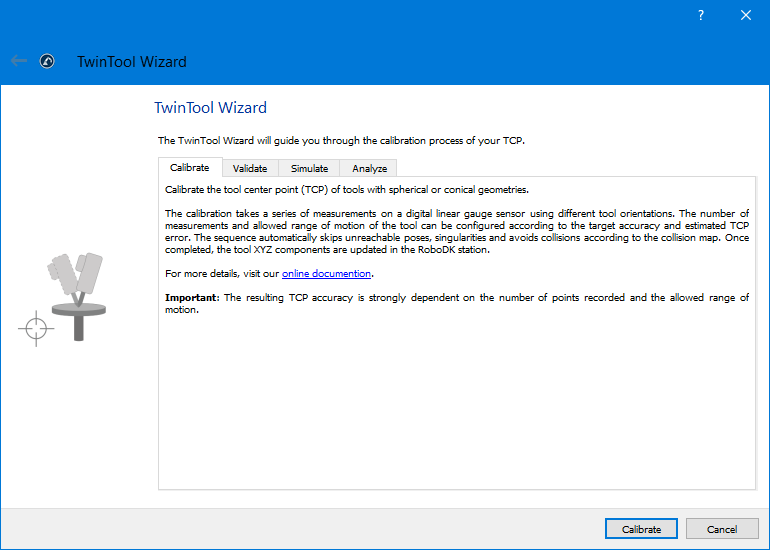
キャリブレーション・ウィザード
キャリブレーション手順を開始するには、TwinTool➔
ウィザードを起動すると、


ヒントロボットの可動域を変更するには、ZとXYの関節範囲を変更します。
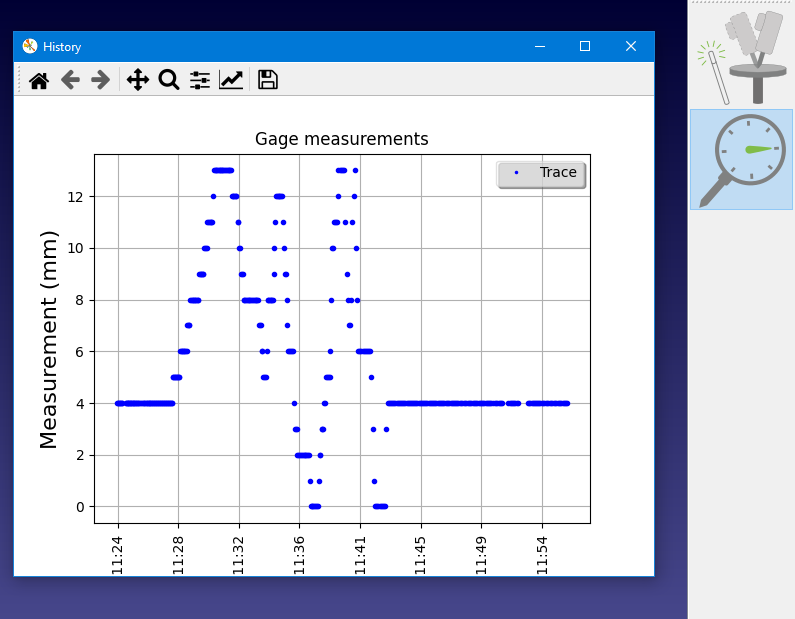
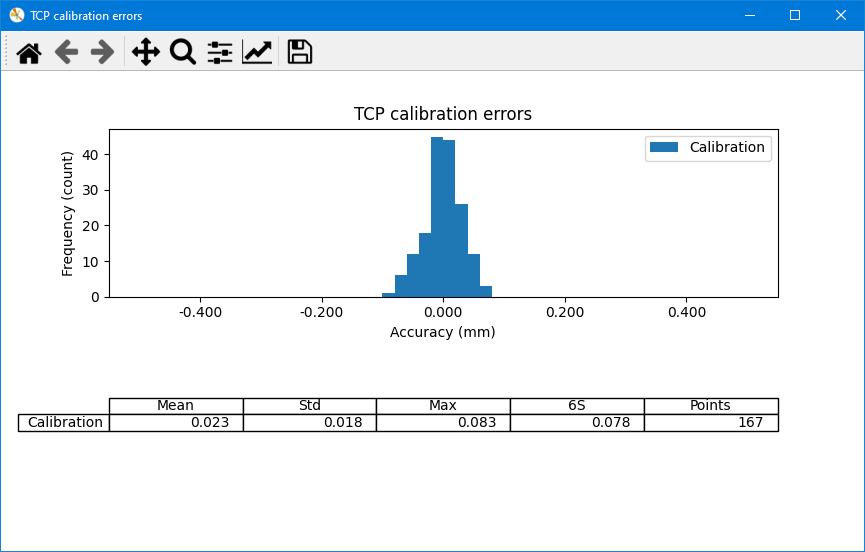
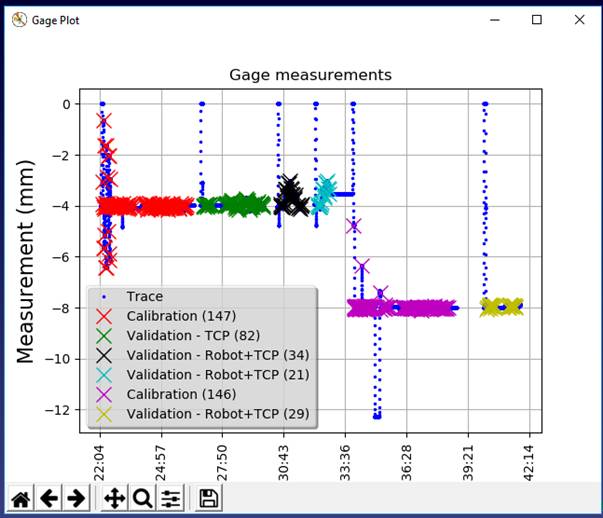
キャリブレーション結果
校正シーケンスが完了すると、ウィザードの
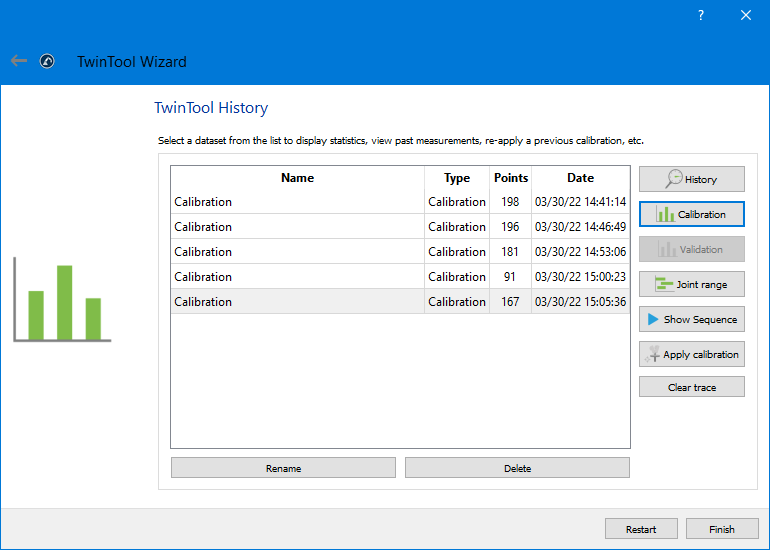
キャリブレーションボタンをクリックすると、キャリブレーション結果を示すチャートが表示されます。ツールセンターポイント(TCP)は公称のロボットキネマティクスを使用して計算されます。
注: TwinTool➔
バリデーション
較正シーケンスを実行したら、いくつかの検証テストを実行できます。これらの検証テストはセンサーの同じ場所でも、異なる場所でも可能です。
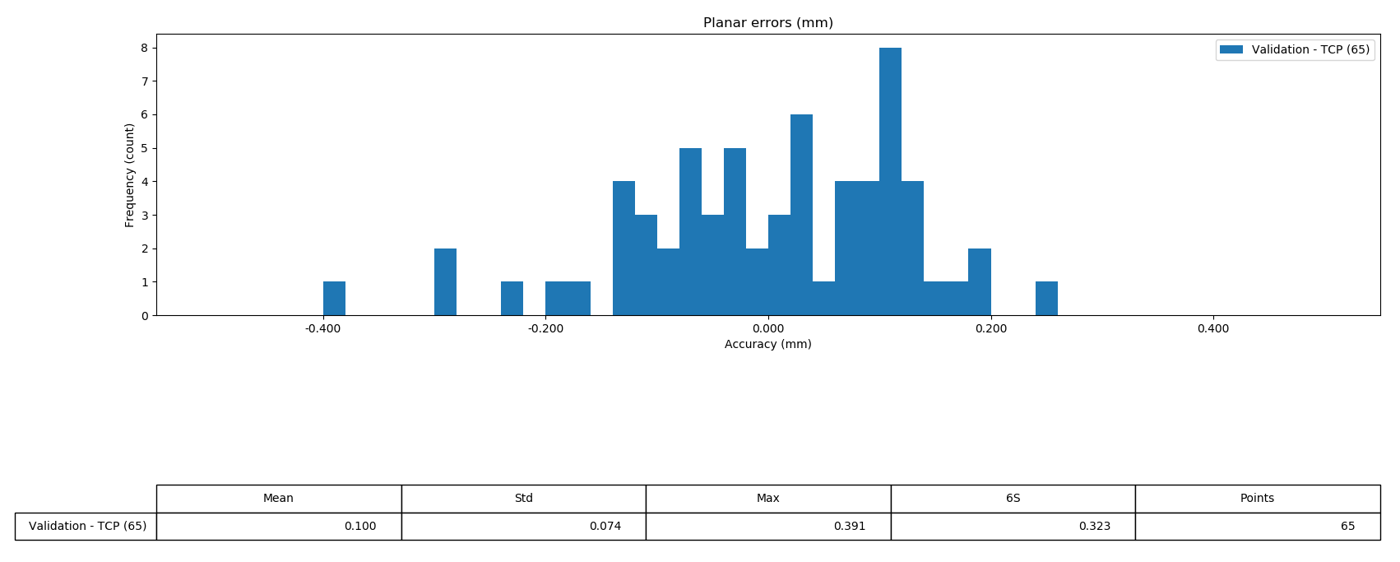
ツールのキャリブレーションを検証
ウィザードから
Validation を選択すると、結果の要約と統計が表示されます。これらの統計は、センサーによって検出された平面誤差に対応します。
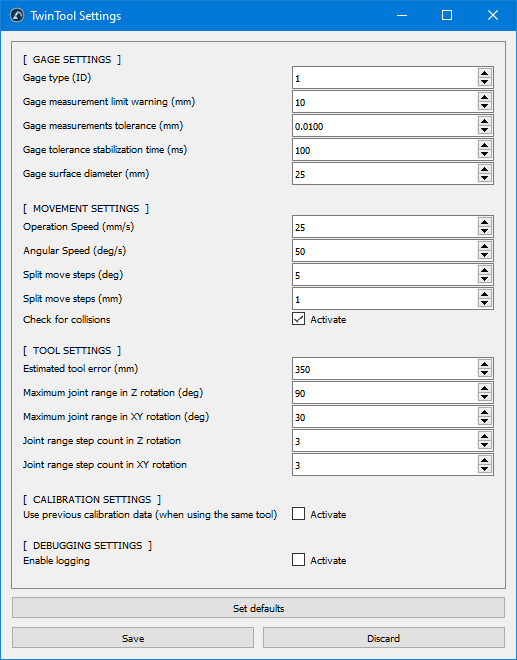
設定
このセクションでは、キャリブレーションをよりカスタマイズし、ロボットの精度をテストするために変更できる追加の設定とオプションについて説明します。
キャリブレーション設定
TwinTool➔ 詳細設定を選択すると、詳細設定の完全なリストが開きます。これらの設定のほとんどは、ウィザードを通じてプロンプトが表示され、設定されます。