オフライン設定#
測定を開始する前に、RoboDKでロボット設定の仮想環境(オフライン設定)を作成することをお勧めします。このセクションでは、RoboDKステーションをオフラインで準備する方法について説明します。これは、RoboDKがインストールされているコンピューターを使用する場合にのみ、ロボットとトラッカーを使用する前に実行できます。
RoboDKキャリブレーション設定の例は、次のフォルダーからダウンロードできます。https://robodk.com/stations#filter?feature=calibration-project.
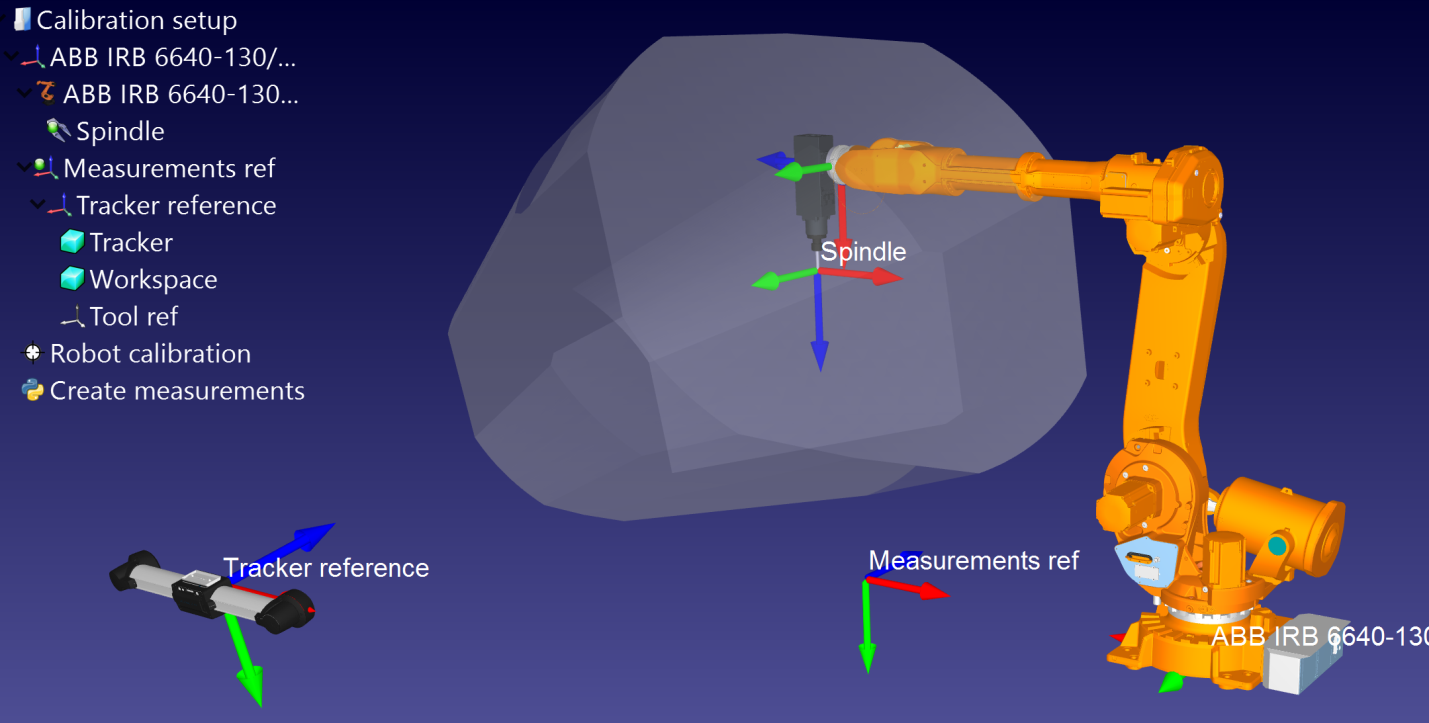
すでにオフラインのセルがある場合は、このセクションをスキップしてください。参照フレームとツールフレームは概算できます。サンプルステーションを次の図に示します。
注:入門セクションでは、新しいRoboDKステーションの作成について詳しく説明します。
RoboDKステーション#CalibCT-Station
RoboDKステーションには、仮想環境ステーションとキャリブレーション情報が保存されます。ステーションはRDKファイルとして保存されます。次の手順に従って、ロボットキャリブレーション用のロボットステーションを最初から作成します(ビデオプレビュー:https://youtu.be/Nkb9uDamFb4):
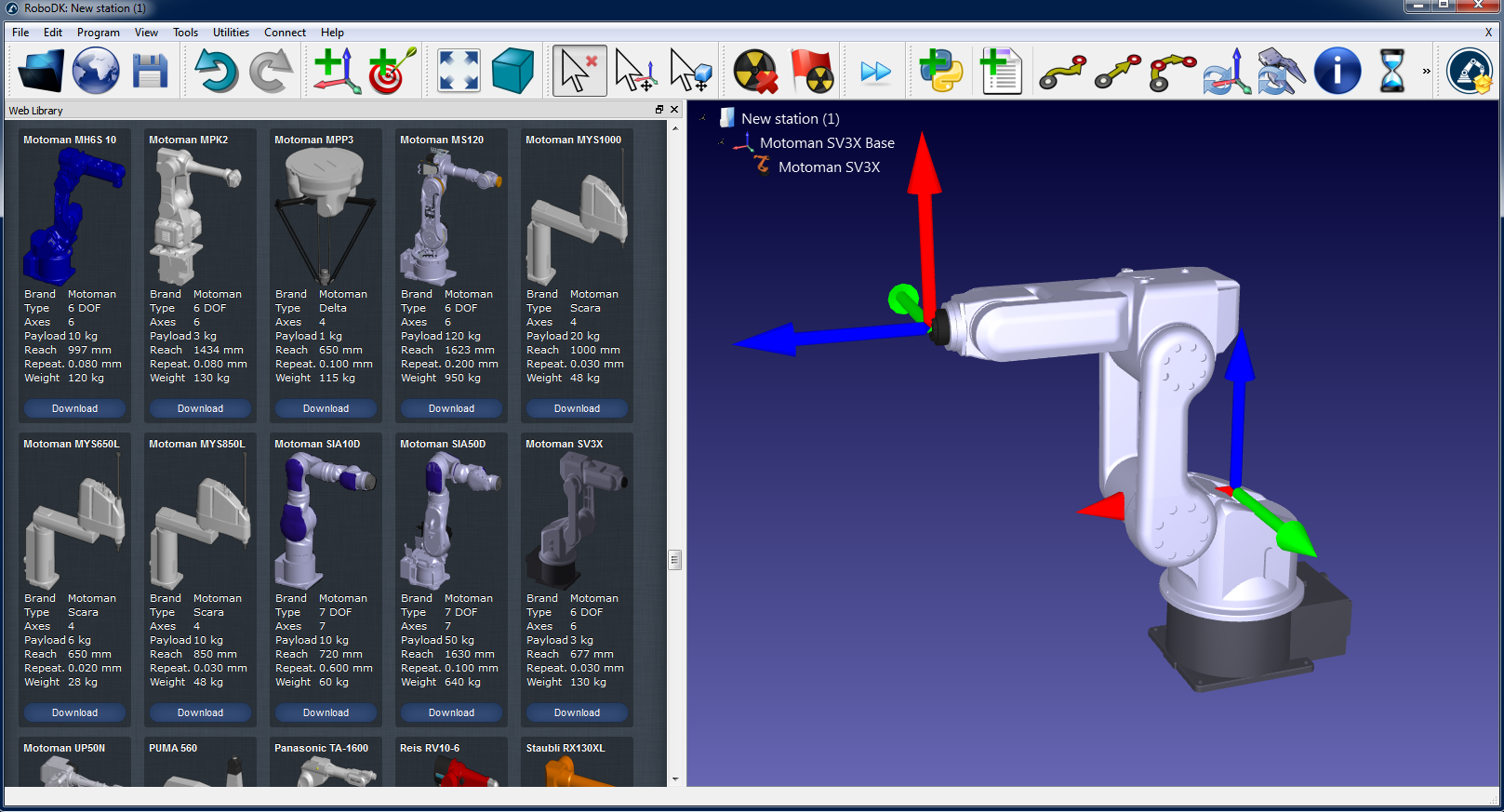
1.ロボットを選択します。
a.ファイルを選択➔オンラインライブラリを開く。オンラインライブラリがRoboDKに表示されます。
b.フィルターを使用して、ロボットをブランド、ペイロードなどで検索します...
c.[ダウンロード]を選択すると、ロボットがステーションに自動的に表示されます。
d.または、ロボットファイル(.robotファイル拡張子)を個別にダウンロードします。https://robodk.com/library RoboDKで開きます。
2.仮想ステーションをモデル化する
a.プログラムを選択して参照フレームを追加する➔参照フレームを追加。
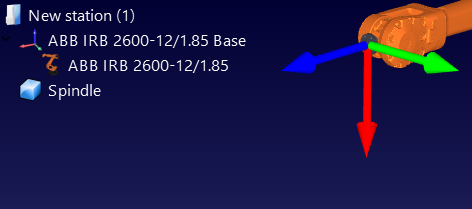
i.ロボットのベースフレームに対して1つの「測定基準」フレームを追加する必要があります。
ii.追加したばかりの「測定値リファレンス」に対して「トラッカーリファレンス」を1つ追加する必要があります。
iii.「Measurements reference」フレームに対して「Tool reference」を1つ追加して、トラッカーから見たツールの位置を視覚化できます。
ヒント1:ツリーにアイテムをドラッグアンドドロップして、現実の世界に存在する依存関係を再構築します。たとえば、トラッカー参照は、「測定参照」に対して配置する必要があります。
ヒント2:AltキーとShift + Altキーをそれぞれ押し続けると、参照フレームまたはツールフレームをほぼ移動できます。または、参照フレームをダブルクリックして、正しい座標を入力することもできます。
ヒント3:アイテムツリーのF2キーを使用してオブジェクトの名前を変更します。
b.ツールオブジェクト(STL、IGESおよびSTEPファイルはサポートされている形式)を追加し、それをロボット(アイテムツリー内)にドラッグアンドドロップします。これにより、オブジェクトがツールに変換されます。利用可能な詳細情報ここに。
オプション:プログラムを選択➔空のツールを追加ステーションで可視化したいTCPを追加します(衝突などをチェックするため)。TCPのおおよその値を設定するには:
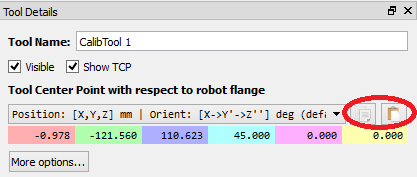
i.新しいツールをダブルクリックします。
ii.おおよそのTCP値を設定します。右側の2つのボタンを使用して、6つの値を一度にコピーして貼り付けることができます。
iii.キャリブレーションに使用されるTCPの名前を「CalibTool id」という名前に変更することをお勧めします。ここで、idはキャリブレーションターゲット番号です。
c.他の3D CADファイル(STL、IGES、STEP、SLDなど)を追加して、メニューファイルを使用して仮想ステーションをモデリングします。➔開いた…または、ファイルをRoboDKのメインウィンドウにドラッグアンドドロップします。
ヒント1:ロボットの測定値がトラッカーのワークスペース内に生成されるように、測定ワークスペースの3Dファイルをインポートし、Workspaceという名前を付けます。または、トラッカーワークスペース内の測定値を制限したくない場合は、ワークスペースを非表示に設定します。詳細については、次のセクションを参照してください。
ヒント2:Ctrl + Alt + Shift + Pを選択して、RoboDKにインポートされた機密の3Dファイルのエクスポートをブロックすることができます。
3.ステーションにキャリブレーションモジュールを追加します。
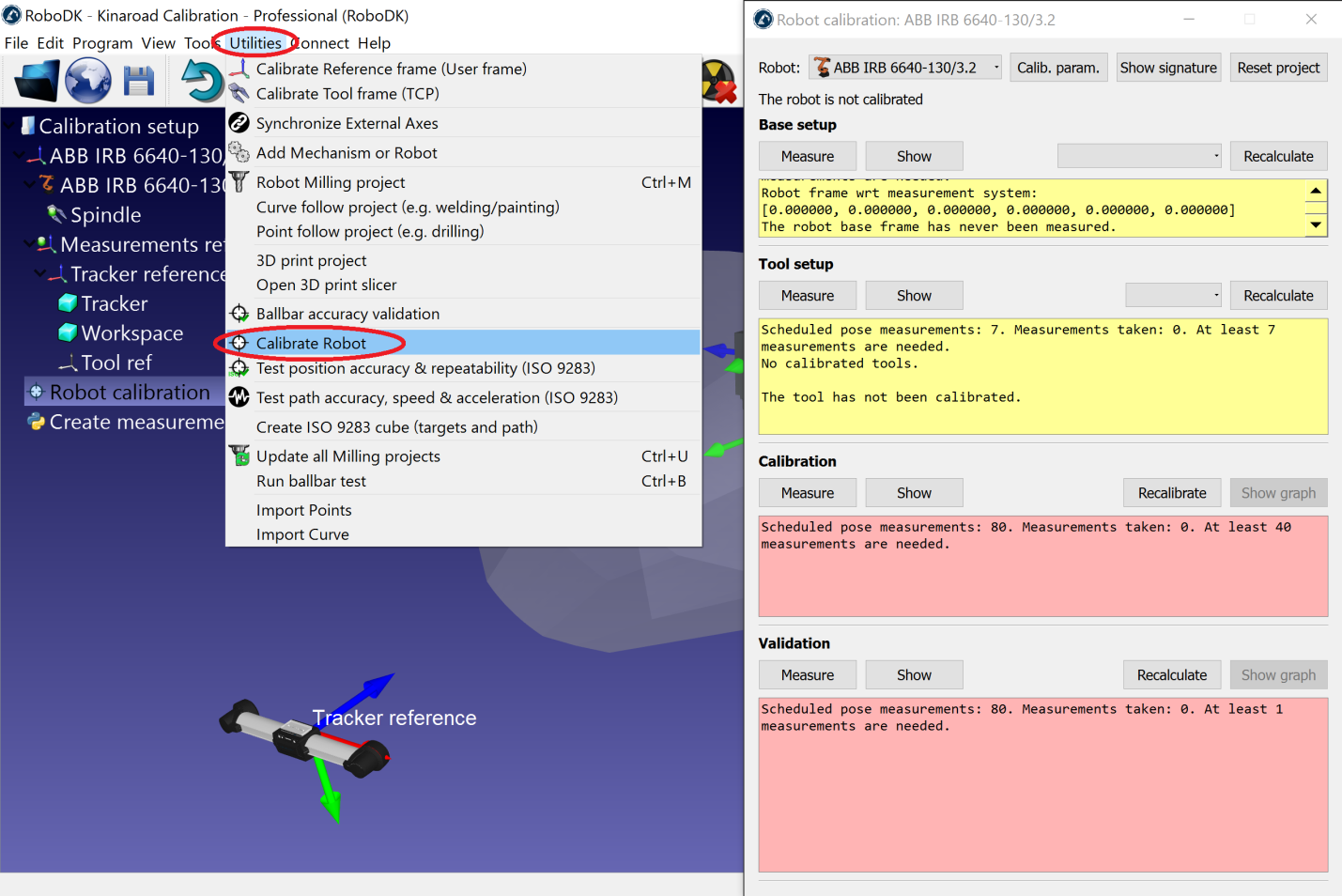
a.メニューユーティリティを選択します➔ロボットの調整。
b.[ステレオカメラ]を選択します。
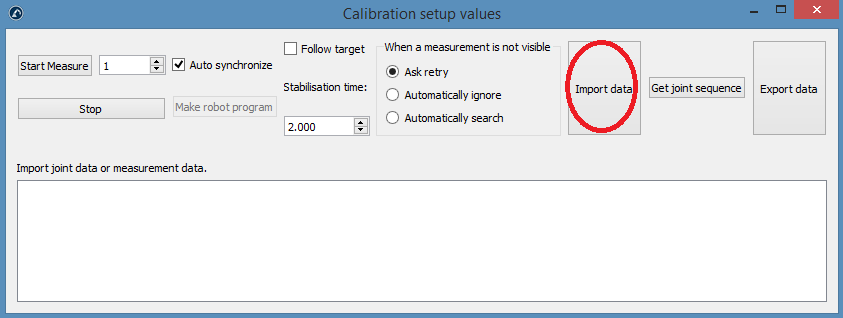
すると、次のウィンドウが表示されます。
このウィンドウは今のところ閉じることができます。ロボットキャリブレーションステーションのアイテムをダブルクリックすることで、いつでも開くことができます。

4.ステーションを保存します。
a.ファイルを選択➔ステーションを保存。
b.フォルダーとファイル名を指定します。
c.保存を選択します。新しいRDKファイルが生成されます(RoboDKステーションファイル)。
RDKファイルを開くことで、ステーションの変更をいつでも回復できます(Windowsではファイルをダブルクリックします)。
要約すると、次の点を再確認することが重要です。
1.基準フレーム「測定基準」は、ロボットベースの基準フレームに直接取り付けられています。
ここでは、この参照フレームの推定値(概算値)を使用できます。
2.Tracker参照はMeasurements参照に直接接続されます。トラッカー参照は、測定参照に対するトラッカー測定デバイスの推定位置でなければなりません。
3.「ロボットキャリブレーション」プロジェクトがステーションに存在し、計画しているすべての測定は衝突がなく、トラッカーで表示されます(キャリブレーション設定をダブルクリックし、4つの測定グループの各グループの表示を選択します)。
4.衝突を自動的にチェックしたい場合は、衝突のチェックに使用するすべてのオブジェクトで名前タグ「collision」を使用する必要があります。衝突を安全に回避するために、キャリブレーション済みのツールより約25%大きいツールを使用することをお勧めします。
キャリブレーションターゲットを生成する#CalibCT-Generate
ロボットのキャリブレーションを正常に実行するために必要な測定セットは4つあります。
1.基本セットアップ:ロボットに対して校正基準を配置するには、6つ(またはそれ以上)の移動軸1および2が必要です。キャリブレーション設定ウィンドウで[表示]を選択すると、ロボットがシーケンスに沿って移動します。
2.ツールのセットアップ:ツールフランジとツールターゲット(移動軸5および6)を校正するには、7回以上の測定が必要です。[表示]を選択すると、ロボットがシーケンスに沿って移動します。
3.校正測定:ロボットのキャリブレーションには60回以上の測定が必要です。これらの測定値は、ロボットのワークスペースにランダムに配置でき、周囲のオブジェクトとの衝突がありません。
4.検証測定(オプション):ロボットの精度を検証するために、必要なだけの測定を使用できます。これらの測定値は、ロボットの精度を検証するためにのみ使用され、ロボットのキャリブレーションには使用されません。
最初の2つの測定セットは、RoboDKによって自動的に生成されます。[表示]を選択すると、ロボットはシーケンスに従います(次の図に示すとおり)。シーケンスを変更する必要がある場合は、[測定]を選択し、[データのエクスポート]を選択して、キャリブレーション測定をCSVファイルとしてエクスポートします。このファイルは、Excelシートを使用して編集し、[データのインポート]をクリックして再インポートできます。
最後の2つの測定セット(キャリブレーションと検証)は、「
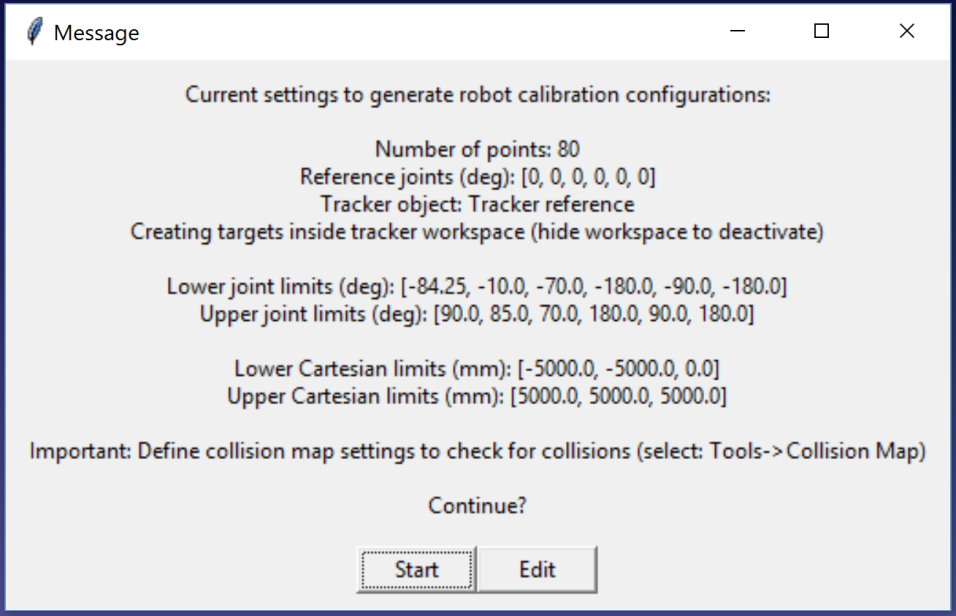
●測定数:生成する測定の数。ロボットのキャリブレーションには最低60回の測定が必要なため、デフォルトでは80回の測定が使用されます。
●参照位置:参照位置は、ターゲットが表示されているツールがトラッカーに面しているロボットの位置である必要があります。
●ジョイント制限:ジョイントの下限と上限を指定する必要があります。
●デカルトの制限:ロボットの参照フレームに関してデカルトの制限(X、Y、Z値)を提供できます。
スクリプトは、ツールがトラッカーに面している場所で測定値を自動的に生成し、関節とデカルトの制約を尊重します。ツールを中心とした+/- 180度の回転は、参照位置でトラッカーに面する方向を中心に許可されます。さらに、関節の動きのシーケンスは、衝突がなく、測定ワークスペース内にあります(ワークスペースが表示されるように設定されている場合)。次の画像は、自動シーケンスが開始する前にユーザーに表示される概要を示しています。シーケンスが完了するまでに最大5分かかる場合があります。
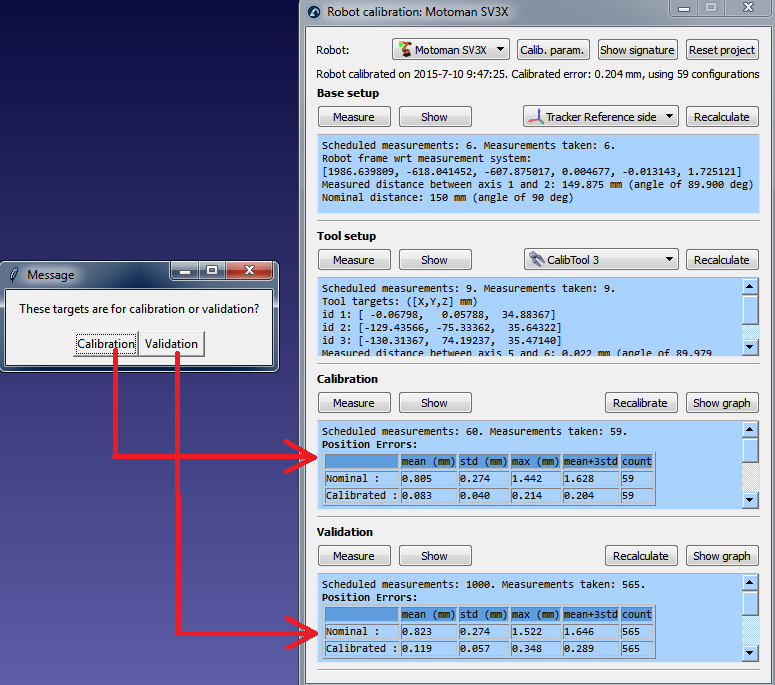
アルゴリズムが完了すると、新しいメッセージがポップアップします。60の測定値をロボットのキャリブレーションに使用するには、[キャリブレーション]を選択します。同じスクリプトを再実行して、検証用の別の測定セットを生成できます。このステップはオプションですが、検証のために60回以上の測定が推奨されます。
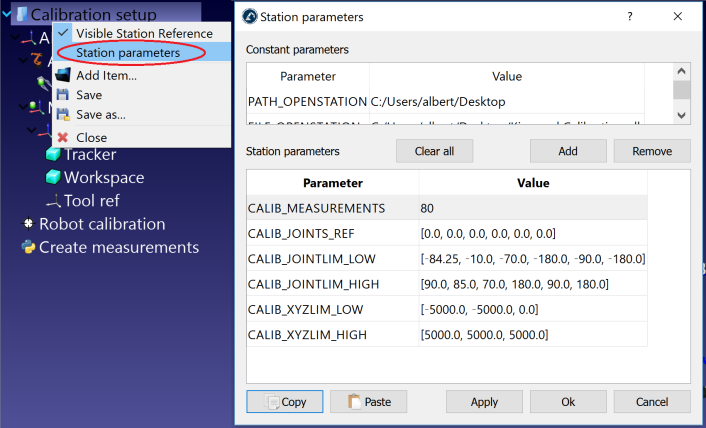
必要に応じて、[測定の作成]スクリプトを右クリックして[スクリプトの編集]を選択することにより、スクリプトを変更してから、アルゴリズムの追加パラメーターを変更できます。スクリプトは、ユーザー入力をステーションパラメータとして自動的に保存します。次の画像に示すように、ステーションを右クリックしてステーションパラメータを選択することにより、これらの設定を表示、編集、または削除できます。
最後に、[メジャー]メニュー内の[データのインポート]を選択して、手動で選択した構成をインポートすることもできます。CSVまたはTXTファイルをNx6マトリックスとしてインポートできます。ここで、Nは構成の数です。