キャリブレーションターゲットを生成する#
ロボットのキャリブレーションを正常に実行するために必要な測定セットは4つあります。
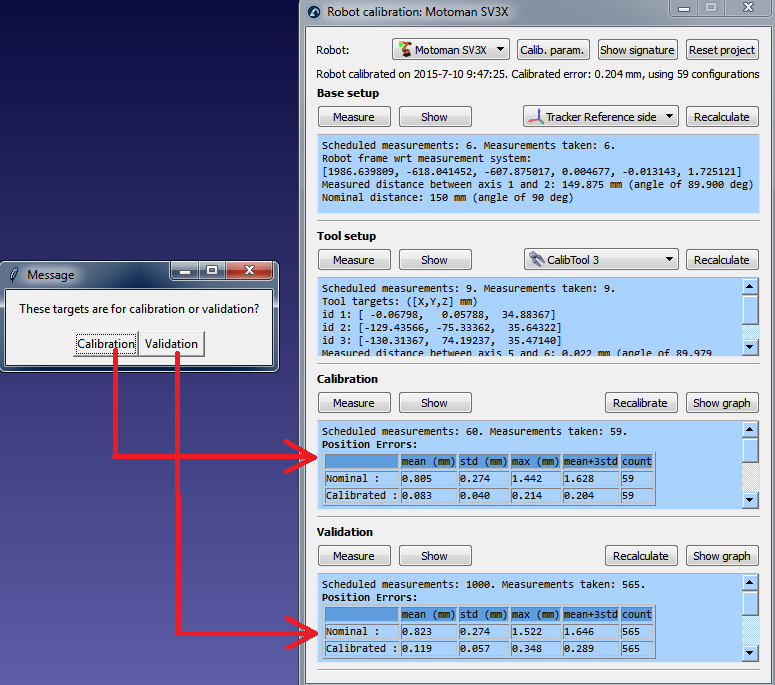
1.基本セットアップ:ロボットに対して校正基準を配置するには、6つ(またはそれ以上)の移動軸1および2が必要です。キャリブレーション設定ウィンドウで[表示]を選択すると、ロボットがシーケンスに沿って移動します。
2.ツールのセットアップ:ツールフランジとツールターゲット(移動軸5および6)を校正するには、7回以上の測定が必要です。[表示]を選択すると、ロボットがシーケンスに沿って移動します。
3.校正測定:ロボットのキャリブレーションには60回以上の測定が必要です。これらの測定値は、ロボットのワークスペースにランダムに配置でき、周囲のオブジェクトとの衝突がありません。
4.検証測定(オプション):ロボットの精度を検証するために、必要なだけの測定を使用できます。これらの測定値は、ロボットの精度を検証するためにのみ使用され、ロボットのキャリブレーションには使用されません。
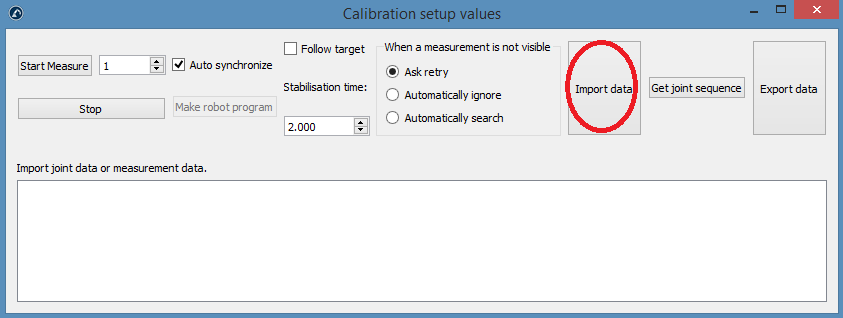
最初の2つの測定セットは、RoboDKによって自動的に生成されます。[表示]を選択すると、ロボットはシーケンスに従います(次の図に示すとおり)。シーケンスを変更する必要がある場合は、[測定]を選択し、[データのエクスポート]を選択して、キャリブレーション測定をCSVファイルとしてエクスポートします。このファイルは、Excelシートを使用して編集し、[データのインポート]をクリックして再インポートできます。
最後の2つの測定セット(キャリブレーションと検証)は、「
●測定数:生成する測定の数。ロボットのキャリブレーションには最低60回の測定が必要なため、デフォルトでは80回の測定が使用されます。
●参照位置:参照位置は、ターゲットが表示されているツールがトラッカーに面しているロボットの位置である必要があります。
●ジョイント制限:ジョイントの下限と上限を指定する必要があります。
●デカルトの制限:ロボットの参照フレームに関してデカルトの制限(X、Y、Z値)を提供できます。
スクリプトは、ツールがトラッカーに面している場所で測定値を自動的に生成し、関節とデカルトの制約を尊重します。ツールを中心とした+/- 180度の回転は、参照位置でトラッカーに面する方向を中心に許可されます。さらに、関節の動きのシーケンスは、衝突がなく、測定ワークスペース内にあります(ワークスペースが表示されるように設定されている場合)。次の画像は、自動シーケンスが開始する前にユーザーに表示される概要を示しています。シーケンスが完了するまでに最大5分かかる場合があります。
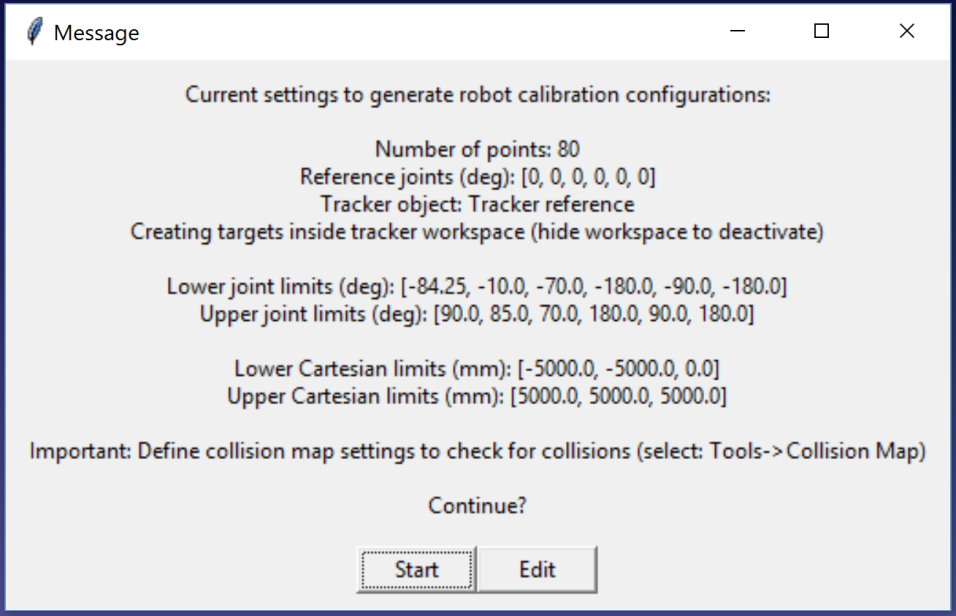
アルゴリズムが完了すると、新しいメッセージがポップアップします。60の測定値をロボットのキャリブレーションに使用するには、[キャリブレーション]を選択します。同じスクリプトを再実行して、検証用の別の測定セットを生成できます。このステップはオプションですが、検証のために60回以上の測定が推奨されます。
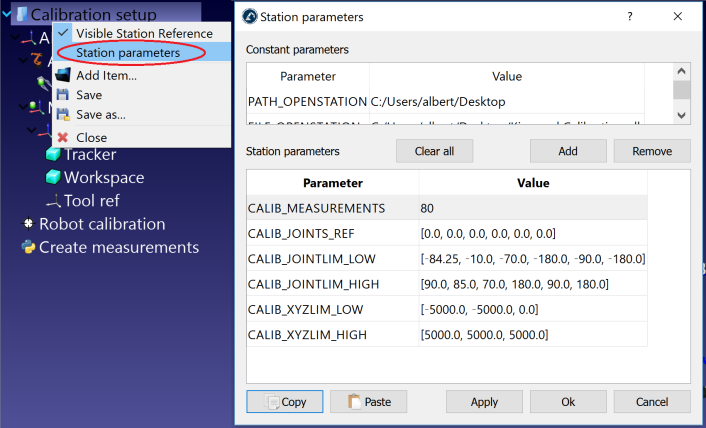
必要に応じて、[測定の作成]スクリプトを右クリックして[スクリプトの編集]を選択することにより、スクリプトを変更してから、アルゴリズムの追加パラメーターを変更できます。スクリプトは、ユーザー入力をステーションパラメータとして自動的に保存します。次の画像に示すように、ステーションを右クリックしてステーションパラメータを選択することにより、これらの設定を表示、編集、または削除できます。
最後に、[メジャー]メニュー内の[データのインポート]を選択して、手動で選択した構成をインポートすることもできます。CSVまたはTXTファイルをNx6マトリックスとしてインポートできます。ここで、Nは構成の数です。