ロボットキャリブレーションのセットアップ#
2つのオブジェクトが必要です。ツールオブジェクト(ロボットが保持)とベース参照オブジェクト(セル内で静的)です。トラッカーは、各測定のツールオブジェクトと基本参照オブジェクトを表示できる必要があります。これらのオブジェクトは「モデル」(VXelements)とも呼ばれ、ツールと参照フレームオブジェクトにアタッチされた一連のターゲットによって定義されます。トラッカーは、これらのターゲットの位置を追跡し、トラッカーに対する測定としてこれらのオブジェクトの参照フレームを提供します。RoboDKは、各測定値を基本参照フレームに対するツールの位置として取得するため、測定値を変更せずにトラッカーを移動できます。
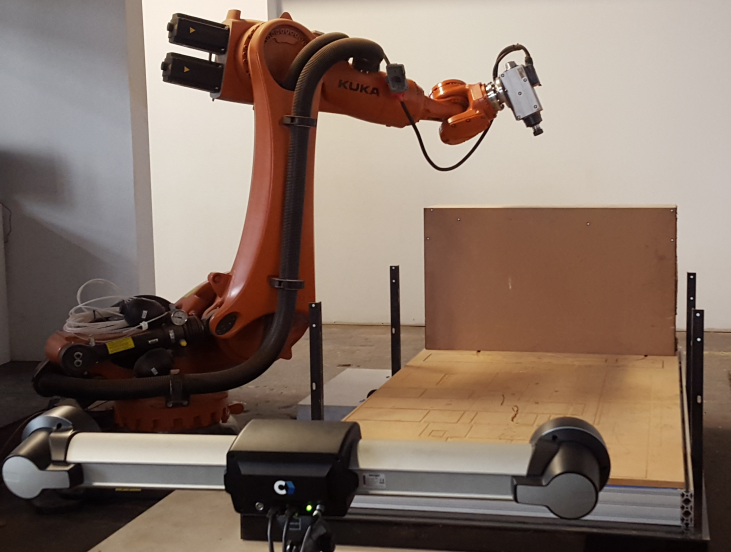
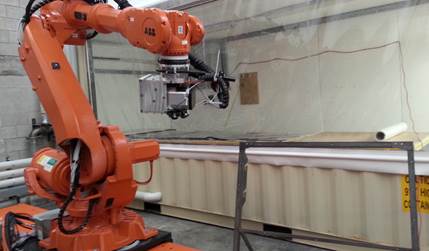
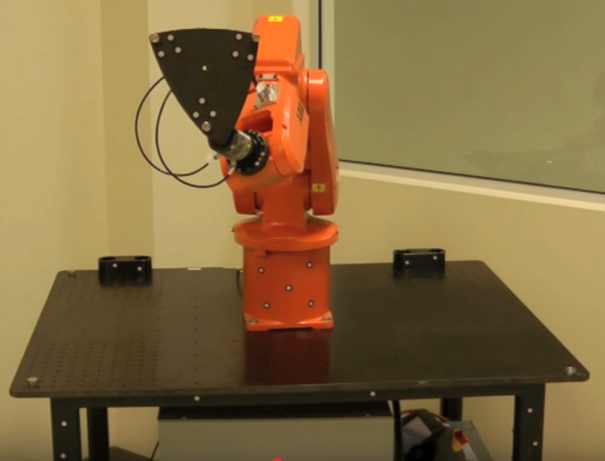
これらのオブジェクトを適切に追跡できるようにするには、ターゲットのグループをツールと参照フレームにそれぞれアタッチする必要があります。次の画像は、適切な設定の例をいくつか示しています。

次のサブセクションは、測定を開始する準備ができるように、順次実行する必要があります。最後に、測定を行う手順を自動化するために、トラッカーとロボットをコンピューターに接続する必要があります。
参照フレームのプローブ#CalibCT-HandyProbe
最初に、2つのモデルが必要です。1つはツールのモデル、もう1つは基本参照フレームのモデルです。1つのモデルは、モデル参照(ツールまたはベース参照フレーム)に関するターゲットに対応する点(X、Y、Z座標)のリストとして定義された1つのオブジェクトです。オプションで、HandyProbeを使用して、参照フレームを必要な場所に配置できます。
ツールとベースモデルを定義するには、次の手順を2回実行する必要があります。
1.VXelementsを起動し、トラッカーを接続します。必要に応じて、トラッカーとHandyProbeを調整します。
2.VXelementsの左側のツリーから[トラッキングモデル]を選択し、[モデルの検出]を選択します。モデル(ツールまたはオブジェクト)に対応するターゲットを選択し、「承認」を選択します。
ヒント:Ctrlキーを押しながらターゲットのグループを選択します。

3.オブジェクトの参照フレームは、オブジェクトの特定の特徴に対して特定の位置に配置できます。このステップはオプションですが、ロボットフランジに対してTCPフィーチャーを正確に配置する必要がある場合は強くお勧めします。たとえば、スピンドル軸として使用される参照円柱に沿ってツールのZ軸を正確に配置できます。
オブジェクトの参照フレームを適切に移動するには、HandyProbeを使用して、これらの機能を仮想VXelementsセッションに組み込む必要があります。使用されているモデルは、このモデルに関してフィーチャがプローブされるように、位置決めモデルとして定義する必要があります。ポイント、ライン、プレーン、シリンダー、コーンを調査し、これらのフィーチャーに関して参照フレームを定義することができます。
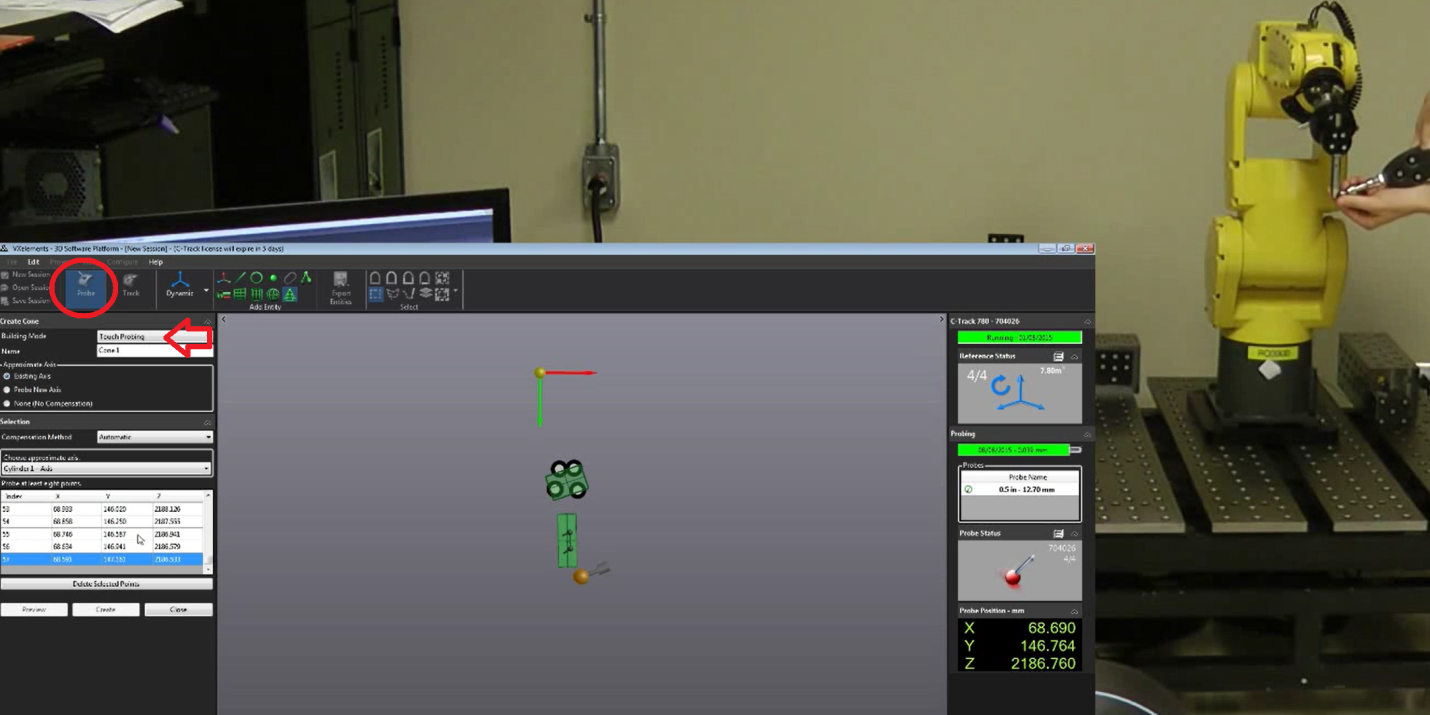
完了したら、モデルをtxtファイルとしてエクスポートできます。テキストファイル内のターゲットは、XYZポイントのリストとして表示されます。
注意:追跡されるオブジェクトが非常に複雑な場合は、MaxShotデバイスまたは写真測量サービスを使用して、オブジェクトモデルを適切に定義できます。この手順により、より正確な結果が得られる場合があります。
トラッカーに接続#CalibCT-Tracker
RoboDKで通信を適切に設定するには、トラッカーのIPが必要です。VXelementsが実行されていないことを確認し、次の手順に従ってトラッカーとの通信を確認します。
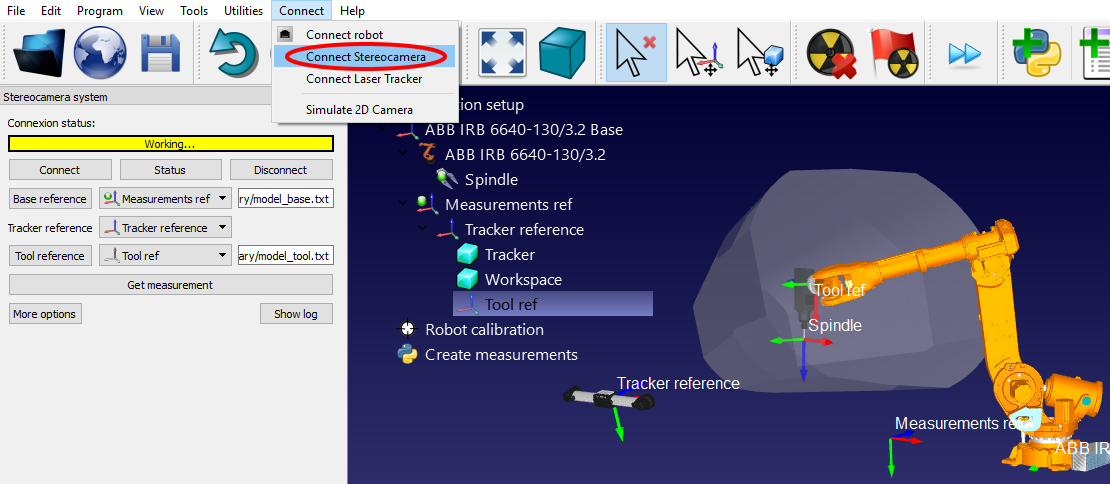
a.メニューの「接続➔ステレオカメラを接続してください。」新しいウィンドウが開きます。
b.「ベースモデル」と「ツールモデル」をテキストファイルとして入力します(前のセクションで生成)。これらは、それぞれ基準フレームとツールフレームを定義するターゲットの位置です。
c.「接続」ボタンを選択します。
d.接続が成功したら、BaseモデルとToolモデルをテキストファイル(.txt)として提供する必要があります。
VXelementsの統合バージョンが開始し、数秒後、接続が成功した場合は「準備完了」を示す緑色のメッセージが表示されます。VXelementsウィンドウを閉じることができ、接続はアクティブなままになります。接続が成功しない場合は、Windowsタスクバーまたはタスクマネージャー(CTRL + ALT + DELを選択して「VXelementsApiImplementation」プロセスを強制的に停止する)の背後でVXelementsプロセスが実行されていないことを確認してから、[接続]を選択します。 RoboDKを再試行してください。
ロボットに接続する#CalibCT-Driver
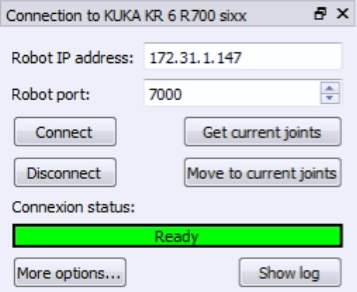
RoboDKとの通信を適切に設定するには、ロボットのIP(またはRS232接続のCOMポート番号)が必要です。次の手順に従って、ロボットとの通信を確認します。
1.接続を選択➔ロボットを接続する。新しいウィンドウが表示されます。
2.ロボットのIPおよびポートを設定します(RS232経由の場合はCOMポート)。
3.[接続]ボタンをクリックします。
4.問題が発生した場合は、付録を参照してください。
注意: 詳細については、プログラムセクション。
接続が成功すると、準備完了を示す緑色のメッセージが表示されます。[現在のジョイントを取得]を選択した場合、仮想ロボットの位置は実際のロボットの位置と正確に一致する必要があります。または、[現在の関節に移動]を選択して、シミュレーターで設定された現在の位置にロボットを移動します。ウィンドウを閉じることができ、接続はアクティブなままになります。