参照フレームのプローブ#
最初に、2つのモデルが必要です。1つはツールのモデル、もう1つは基本参照フレームのモデルです。1つのモデルは、モデル参照(ツールまたはベース参照フレーム)に関するターゲットに対応する点(X、Y、Z座標)のリストとして定義された1つのオブジェクトです。オプションで、HandyProbeを使用して、参照フレームを必要な場所に配置できます。
ツールとベースモデルを定義するには、次の手順を2回実行する必要があります。
1.VXelementsを起動し、トラッカーを接続します。必要に応じて、トラッカーとHandyProbeを調整します。
2.VXelementsの左側のツリーから[トラッキングモデル]を選択し、[モデルの検出]を選択します。モデル(ツールまたはオブジェクト)に対応するターゲットを選択し、「承認」を選択します。
ヒント:Ctrlキーを押しながらターゲットのグループを選択します。

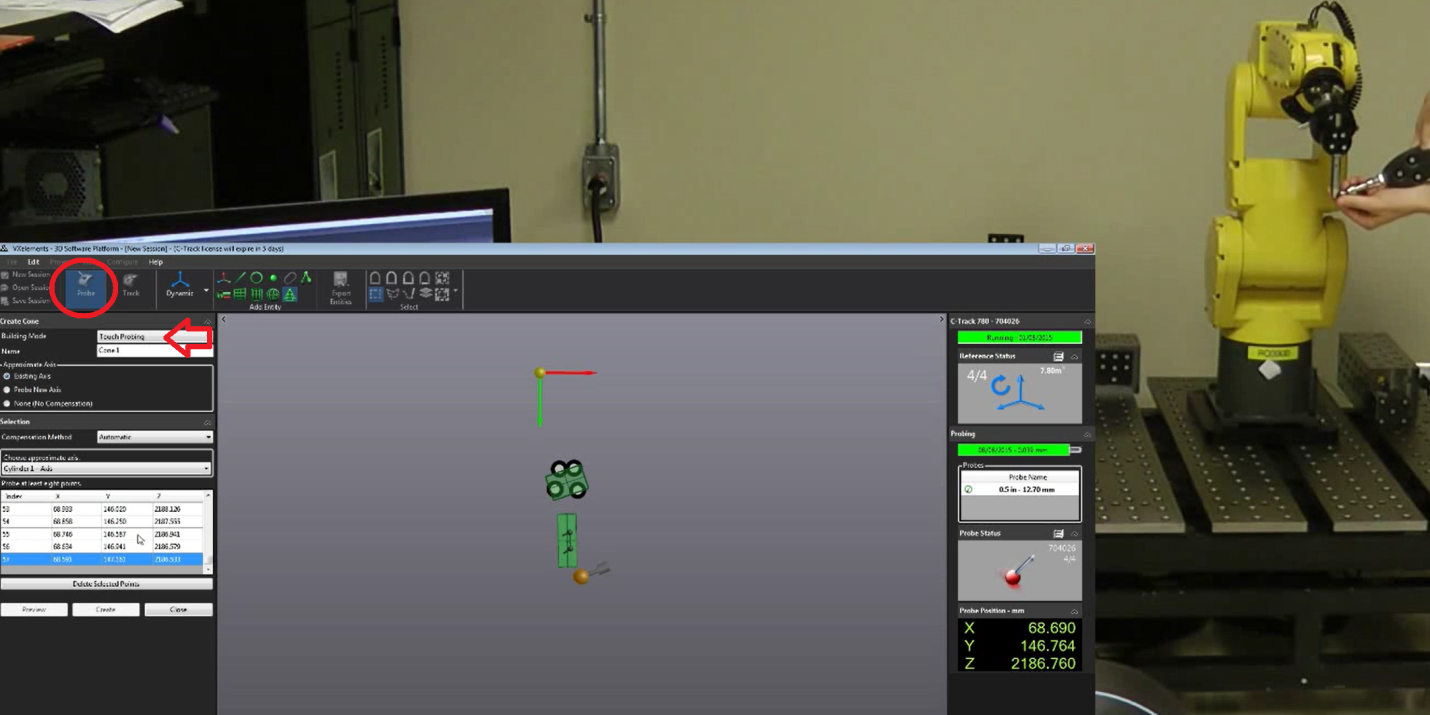
3.オブジェクトの参照フレームは、オブジェクトの特定の特徴に対して特定の位置に配置できます。このステップはオプションですが、ロボットフランジに対してTCPフィーチャーを正確に配置する必要がある場合は強くお勧めします。たとえば、スピンドル軸として使用される参照円柱に沿ってツールのZ軸を正確に配置できます。
オブジェクトの参照フレームを適切に移動するには、HandyProbeを使用して、これらの機能を仮想VXelementsセッションに組み込む必要があります。使用されているモデルは、このモデルに関してフィーチャがプローブされるように、位置決めモデルとして定義する必要があります。ポイント、ライン、プレーン、シリンダー、コーンを調査し、これらのフィーチャーに関して参照フレームを定義することができます。
完了したら、モデルをtxtファイルとしてエクスポートできます。テキストファイル内のターゲットは、XYZポイントのリストとして表示されます。
注意:追跡されるオブジェクトが非常に複雑な場合は、MaxShotデバイスまたは写真測量サービスを使用して、オブジェクトモデルを適切に定義できます。この手順により、より正確な結果が得られる場合があります。