トラッカーに接続#
RoboDKで通信を適切に設定するには、トラッカーのIPが必要です。VXelementsが実行されていないことを確認し、次の手順に従ってトラッカーとの通信を確認します。
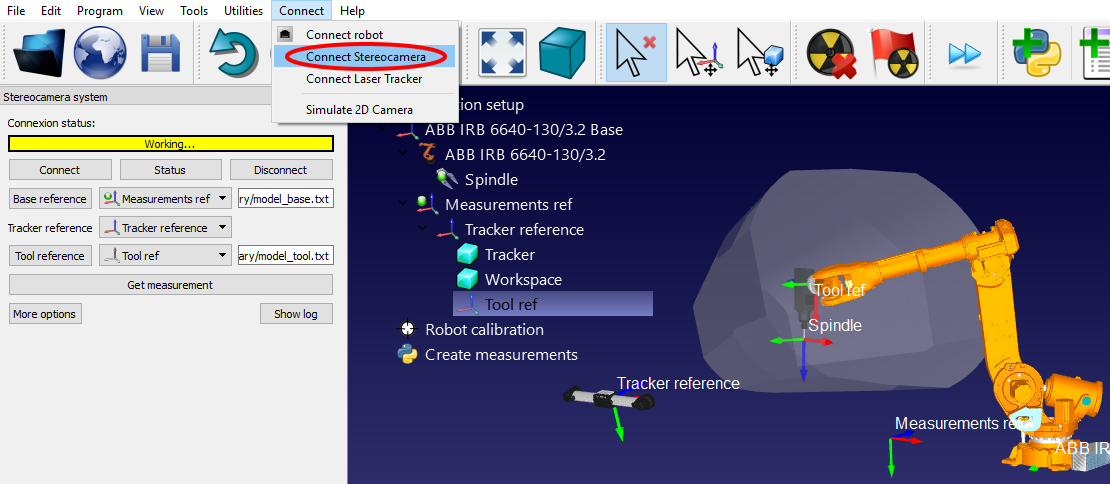
a.メニューの「接続➔ステレオカメラを接続してください。」新しいウィンドウが開きます。
b.「ベースモデル」と「ツールモデル」をテキストファイルとして入力します(前のセクションで生成)。これらは、それぞれ基準フレームとツールフレームを定義するターゲットの位置です。
c.「接続」ボタンを選択します。
d.接続が成功したら、BaseモデルとToolモデルをテキストファイル(.txt)として提供する必要があります。
重要:モデルのテキストファイルは、RoboDKステーションでは保存されません。TXTファイルが外部から変更された場合、次回測定時にモデルが自動的に更新されます。
VXelementsの統合バージョンが開始し、数秒後、接続が成功した場合は「準備完了」を示す緑色のメッセージが表示されます。VXelementsウィンドウを閉じることができ、接続はアクティブなままになります。接続が成功しない場合は、Windowsタスクバーまたはタスクマネージャー(CTRL + ALT + DELを選択して「VXelementsApiImplementation」プロセスを強制的に停止する)の背後でVXelementsプロセスが実行されていないことを確認してから、[接続]を選択します。 RoboDKを再試行してください。