ロボットに接続する#
RoboDKとの通信を適切に設定するには、ロボットのIP(またはRS232接続のCOMポート番号)が必要です。次の手順に従って、ロボットとの通信を確認します。
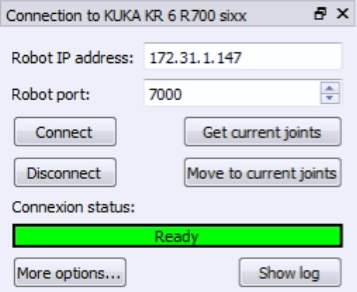
1.接続を選択➔ロボットを接続する。新しいウィンドウが表示されます。
2.ロボットのIPおよびポートを設定します(RS232経由の場合はCOMポート)。
3.[接続]ボタンをクリックします。
4.問題が発生した場合は、付録を参照してください。
注意: 詳細については、プログラムセクション。
接続が成功すると、準備完了を示す緑色のメッセージが表示されます。[現在のジョイントを取得]を選択した場合、仮想ロボットの位置は実際のロボットの位置と正確に一致する必要があります。または、[現在の関節に移動]を選択して、シミュレーターで設定された現在の位置にロボットを移動します。ウィンドウを閉じることができ、接続はアクティブなままになります。
重要:「現在の関節を取得」と「現在の関節に移動」を選択した場合、仮想ロボットの位置は実際のロボットの位置と正確に一致する必要があります。そうでない場合、一部のロボット設定が正しくない可能性があり、一部のロボットパラメータを調整する必要がある場合があります(Motomanロボットのパルス/度比など)。