ロボットのキャリブレーション#
ロボットのキャリブレーションは4つのステップに分かれています。各ステップでは、一連の測定を行う必要があります。次の4つの手順を順番に実行する必要があります。
1.基本参照測定(3分)。
2.ツールリファレンス測定(3分)
3.キャリブレーション測定(7分、60測定)
4.検証測定(7分、60測定)。
次のビデオは、このキャリブレーションを20分で実行する方法を示しています。 https://youtu.be/Htpx-p7tmYs。検証測定(ステップ4)はロボットのキャリブレーションに必須ではありませんが、精度結果の客観的な観点を提供します。ある領域でのロボットのキャリブレーションと別の領域での検証の影響を確認することもできます。
4つの測定セットのそれぞれに対して[測定]ボタンを選択します。これにより新しいウィンドウが開き、既存の測定値をテキストファイル(csvまたはtxt形式)にインポートおよびエクスポートできます。
ベース#CalibCT-Baseの測定
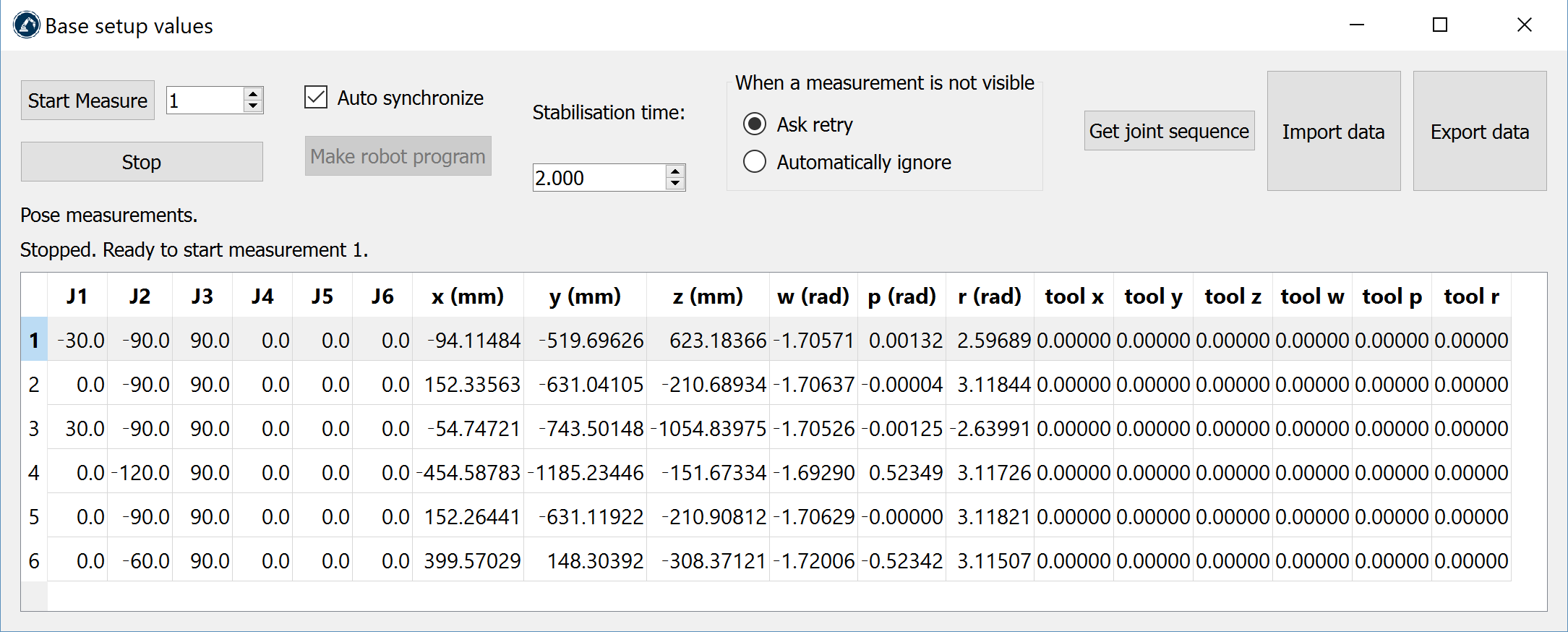
これらの測定は、6つの測定すべてで同じターゲットを測定する場合、ツールフランジの任意の場所で実行できます。測定を開始するには、[基本設定]セクションで[測定]を選択します。次のウィンドウが開きます。次に、[測定開始]を選択すると、ロボットはスケジュールされた測定を順に実行します。
測定が完了したらウィンドウを閉じます。測定基準フレームがロボットのベースフレームに対して更新されます。参照フレームを選択しなかった場合は、参照を追加できます(プログラムを選択します➔参照フレームを追加)をロボットのベース参照の下に配置します(アイテムツリーのドラッグアンドドロップ)。
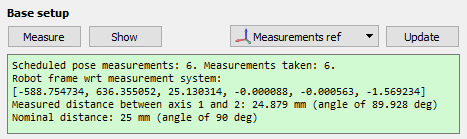
概要には、位置と方向、またはキャリブレーション参照フレームに対するロボット参照フレーム([x、y、z、w、p、r]形式、mmおよびラジアン)が表示されます
この手順が完了すると、RoboDKのロボットに関するトラッカーのワークスペースをリアルタイムで正確に表示できます。
ツールの測定#CalibCT-Tool
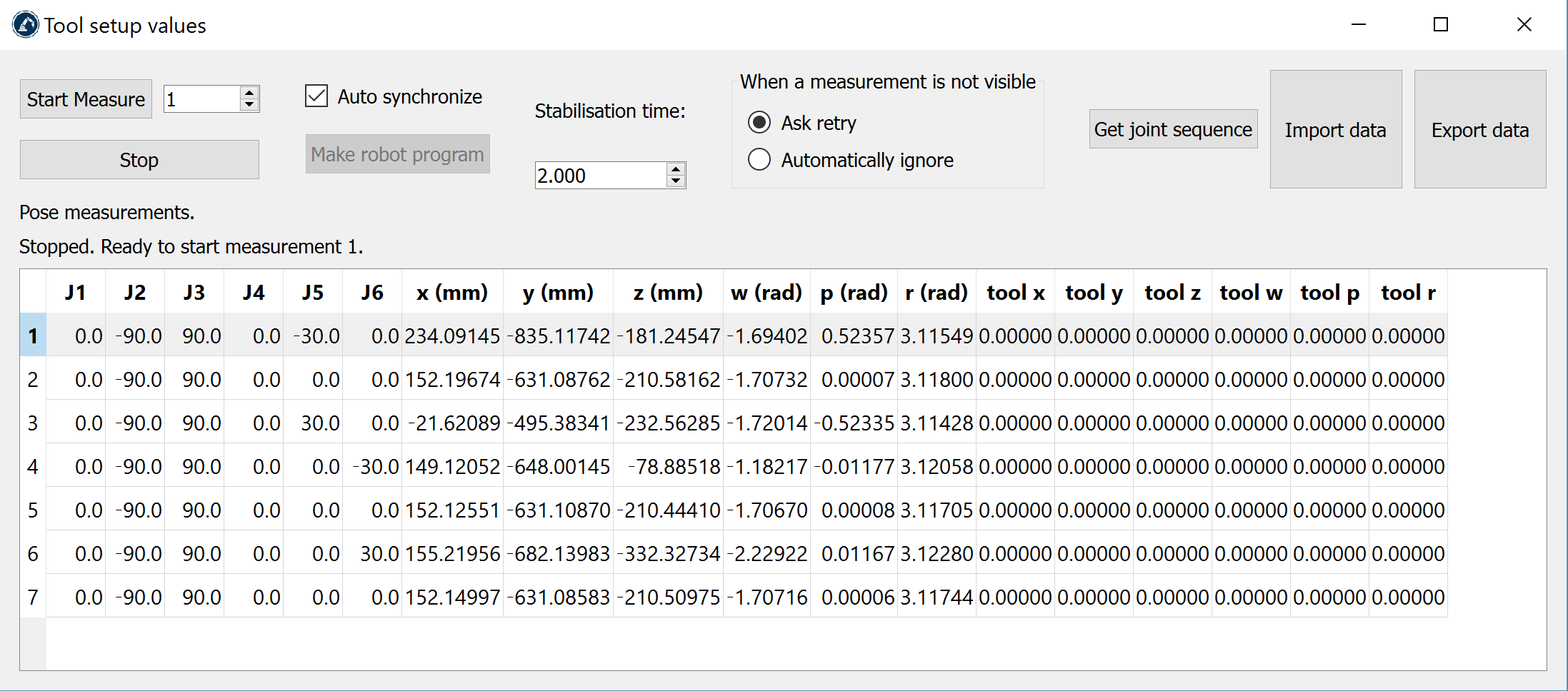
前のセクションと同様に、[ツールセットアップ]セクションで[測定]を選択します。次のウィンドウが開きます。[測定を開始]を選択すると、ロボットは計画された測定を順に実行します。測定をダブルクリックして、その位置から測定を続行します。
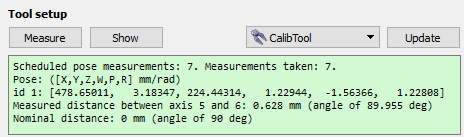
手順が完了すると、要約にキャリブレーションされたTCP(位置と方向)が表示されます。TCPの定義(次の画像「スピンドル」)は自動的に更新されます。TCPを選択しなかった場合は、新しいTCPを追加できます(「プログラム➔空のツールを追加」)、「再計算」を選択します。
ロボットのキャリブレーション#CalibCT-Calib
キャリブレーションセクションで測定を選択します。次のウィンドウが開きます。次に、[測定開始]を選択すると、ロボットは計画された測定を順に実行します。測定をダブルクリックして、その位置から測定を続行します。
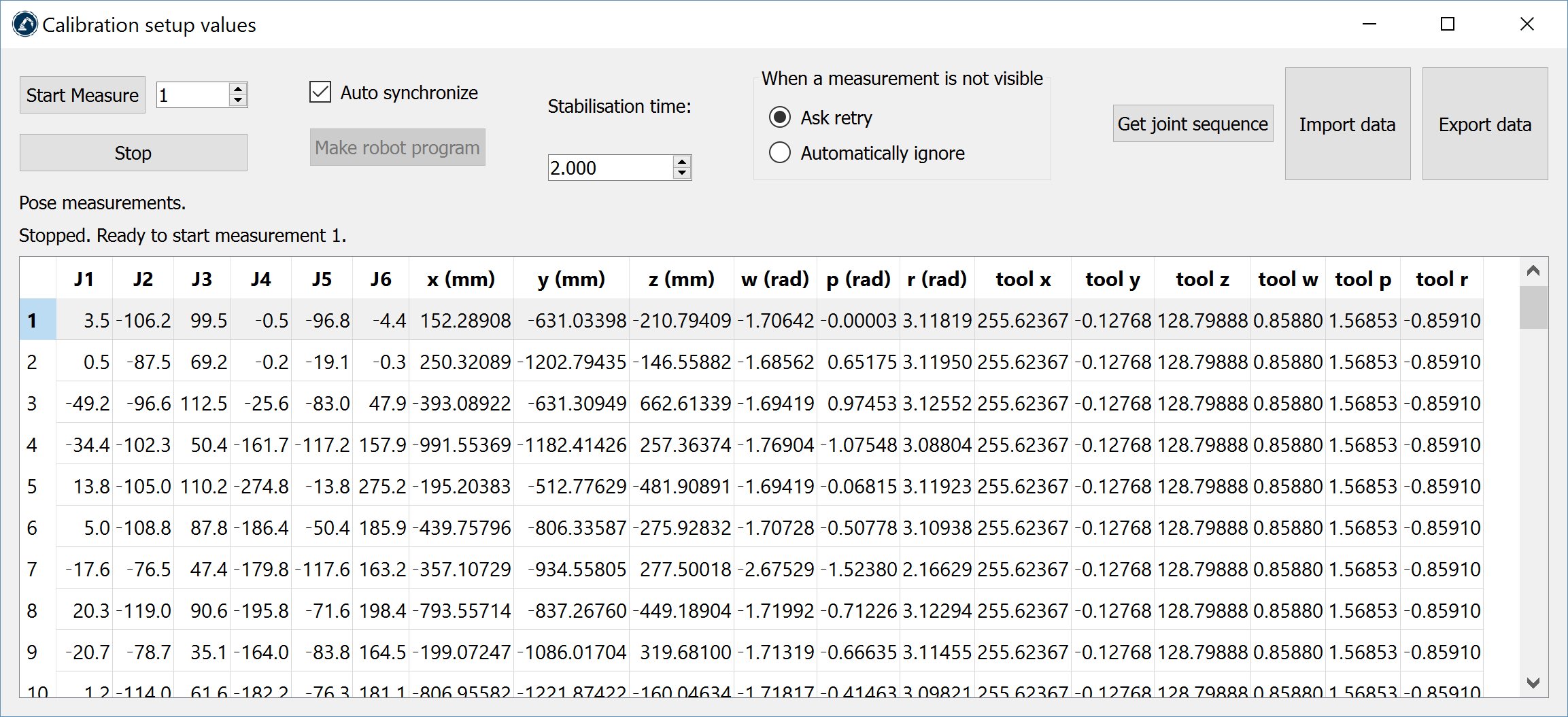
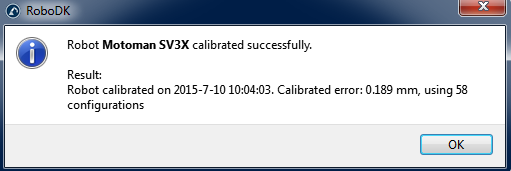
測定が完了したらウィンドウを閉じます。ロボットは自動的に調整され、問題がなければ次のメッセージが表示されます。
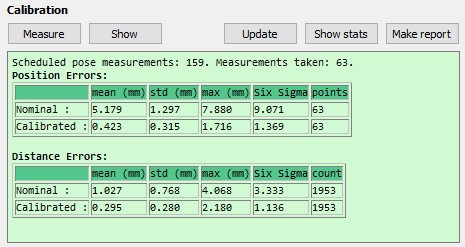
最後に、緑色の画面には、キャリブレーション測定に関する統計と、それらの測定の精度がどの程度向上するかが表示されます。
ロボット検証#CalibCT-Valid
ロボットのキャリブレーションに使用したのと同じ測定値を使用してロボットの精度を検証するべきではないため、精度を検証するために追加の測定を行うことをお勧めします(精度結果のより客観的な観点を持ちます)。
検証測定を行うには、同じ校正手順に従う必要があります。概要には、検証統計が表示されます。次を参照してください結果セクション 詳細については。