ベース#
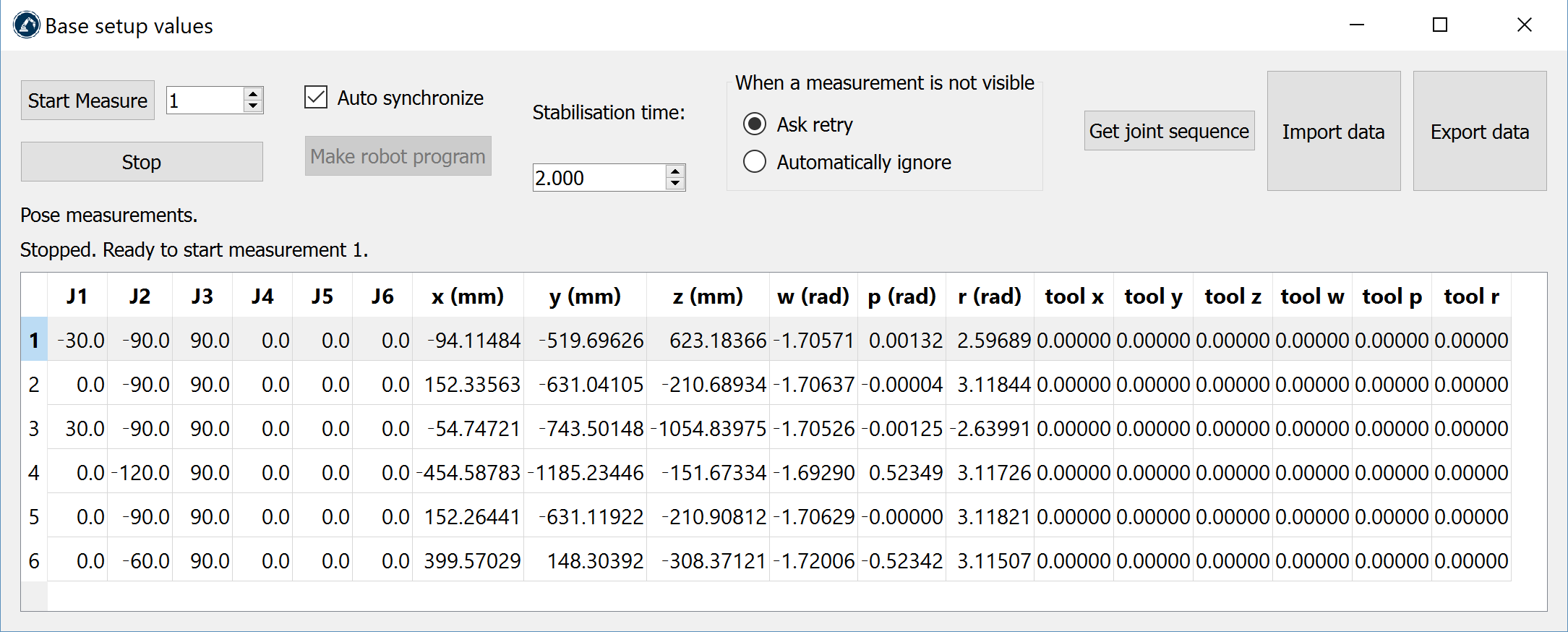
これらの測定は、6つの測定すべてで同じターゲットを測定する場合、ツールフランジの任意の場所で実行できます。測定を開始するには、[基本設定]セクションで[測定]を選択します。次のウィンドウが開きます。次に、[測定開始]を選択すると、ロボットはスケジュールされた測定を順に実行します。
ヒント: 測定をダブルクリックして、その位置から測定を続行します。
測定が完了したらウィンドウを閉じます。測定基準フレームがロボットのベースフレームに対して更新されます。参照フレームを選択しなかった場合は、参照を追加できます(プログラムを選択します➔参照フレームを追加)をロボットのベース参照の下に配置します(アイテムツリーのドラッグアンドドロップ)。
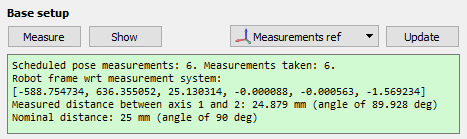
概要には、位置と方向、またはキャリブレーション参照フレームに対するロボット参照フレーム([x、y、z、w、p、r]形式、mmおよびラジアン)が表示されます
この手順が完了すると、RoboDKのロボットに関するトラッカーのワークスペースをリアルタイムで正確に表示できます。