結果#
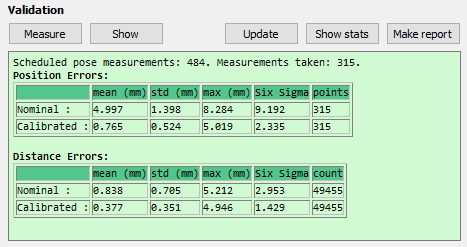
キャリブレーションが完了すると、RoboDKによって提供される統計を読み取ることにより、精度の向上を分析できます。これらの統計を表示するには、ロボットキャリブレーションウィンドウを開きます(ロボットキャリブレーションアイコンをダブルクリックします)。検証セクションの概要ウィンドウには、キャリブレーション前(公称キネマティクス)とキャリブレーション後(キャリブレーションされたキネマティクス)のエラーが表示されます。2つのテーブルが提供されます。1つは位置エラーに関する統計を示し、もう1つは距離エラーを示します。
●位置誤差:位置誤差は、ロボットが参照フレームに対して1点を達成できる精度です。
●距離誤差:距離誤差は、ポイントのペアの距離誤差を測定することによって取得されます。ロボットが認識する2点間の距離(キャリブレーションされた運動学を使用して取得)は、測定システムが認識する距離(物理的に測定)と比較されます。すべての組み合わせが考慮されます。315回測定した場合、315x315 / 2 = 49455の距離エラー値になります。
提供される統計は、平均誤差、標準偏差(std)、および最大誤差です。また、平均に標準偏差の3倍を加えた値も提供されます。これは、すべての測定値の99.98%の予想誤差に対応します(誤差が正規分布に従うことを考慮した場合)。
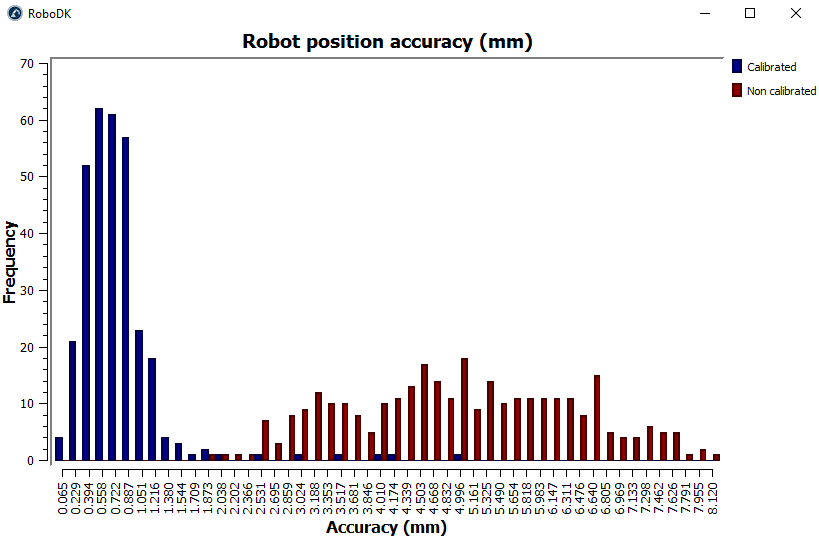
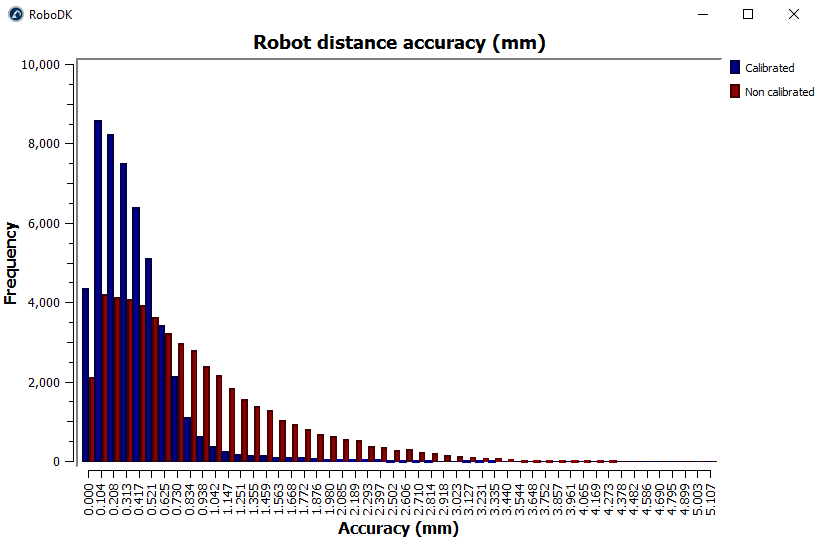
[統計を表示]を選択すると、キャリブレーションの前後の誤差の分布が2つのヒストグラムに表示されます。1つは位置精度のヒストグラム、もう1つは距離精度を示します。次の画像は、この例で使用されている315の検証測定に対応しています。
最後に、「レポートを作成」を選択すると、このセクションに提示された情報を含むPDFレポートが生成されます。