ロボットマスタリング#
ロボットのキャリブレーションが完了すると、通常はプログラムをフィルタリングするためにRoboDKが必要になるため、RoboDKライセンスが必要です(ロボットがキャリブレーションされたら、基本的なOLPライセンスで正確なロボットプログラムを生成できます)。プログラムをフィルタリングするとは、すべてのキャリブレーションパラメーター(約30パラメーター)を考慮に入れて、プログラムのターゲットを変更/最適化してロボットの精度を向上させることです。
または、ジョイントオフセットとベースフレームとツールリファレンスフレームのみをキャリブレーションすることもできます(4つのジョイントオフセットパラメーターと6つのパラメーター、ベースフレームとツールフレームの6つのパラメーター)。キャリブレーションは、デフォルトの完全なキャリブレーションを使用した場合ほど正確ではありませんが、ロボットコントローラーに特定のパラメーターを入力でき、RoboDKに依存せずにロボットプログラムを生成できます。
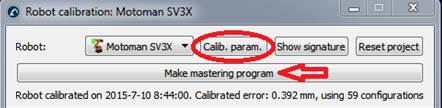
ジョイントオフセットのみのキャリブレーションを取得するには、キャリブレーションを選択する必要があります。パラメータ。ボタン、次にマスタリングボタン(ロボットのキャリブレーションメニュー内)。

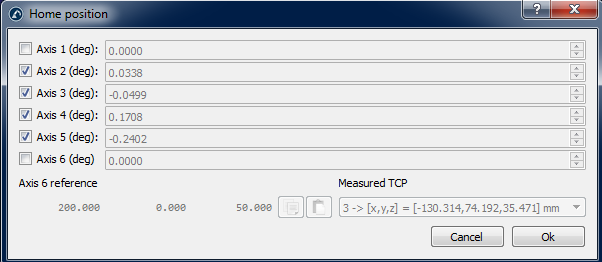
[マスタリングプログラムの作成]を選択すると、新しいウィンドウが表示されます。このウィンドウでは、新しいホームポジションの作成を検討する軸を選択できます。
[マスタリングプログラムの作成]ボタンがロボットのキャリブレーションウィンドウに表示されます。このボタンを選択して、ロボットを新しいホームポジションに戻すプログラムを生成します。ロボットに転送して実行すると、新しいホームポジションが記録されます。
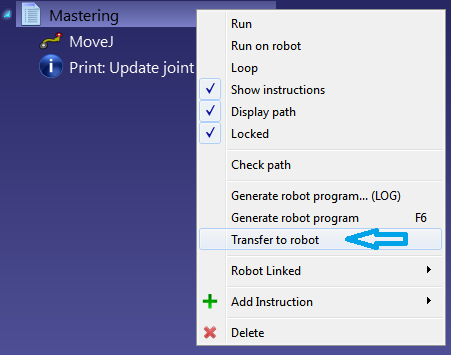
ロボットとPCが接続されている場合は、プログラムを右クリックして、プログラムをロボットに送信プログラムをロボットに自動的に送信します。それ以外の場合は、ロボットプログラムを生成するホームポジションの新しいジョイント値を確認します。