参照フレームとツールフレーム#
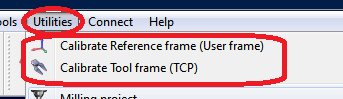
RoboDKには、参照フレームとツールフレームを調整するためのユーティリティがいくつか用意されています。これらのツールはユーティリティからアクセスできます➔参照フレームの調整とユーティリティ➔ツールフレームの調整それぞれ。
参照フレームまたはツールフレーム(それぞれユーザーフレームおよびTCPとも呼ばれます)を調整するには、3つ以上の点に接触するいくつかのロボット構成が必要です。これらのロボット構成は、ジョイント値またはデカルト座標(場合によっては方向データを持つ)のいずれかです。(ロボットの関節をRoboDKのメイン画面にコピーアンドペーストすることにより)RoboDKで実際のロボット構成を確認しやすくなるため、デカルト座標の代わりに関節の値を使用することをお勧めします。
ツールのキャリブレーション#CalibCT-RedoTool
ユーティリティを選択➔校正ツールRoboDKを使用してTCPを調整します。さまざまな方向を使用して、必要な数のポイントを使用できます。より多くのポイントとより大きな方向の変更は、TCPのより良い推定とTCPエラーのより良い推定を得るのでより良いです。
注:詳細については、ヒントセクション。
TCPを調整するには、次の2つのオプションを使用できます。
●方向の異なるTCPで1つの静止点に触れること。
●(タッチプローブのように)TCPで平面に触れる。
タッチプローブまたはスピンドルを調整する必要がある場合は、平面参照に触れて調整することをお勧めします。この方法は、ユーザーエラーに対してより安定しています。
TCPが球形の場合、球の中心は新しいTCPとして計算されます(球の直径を指定する必要はありません)。
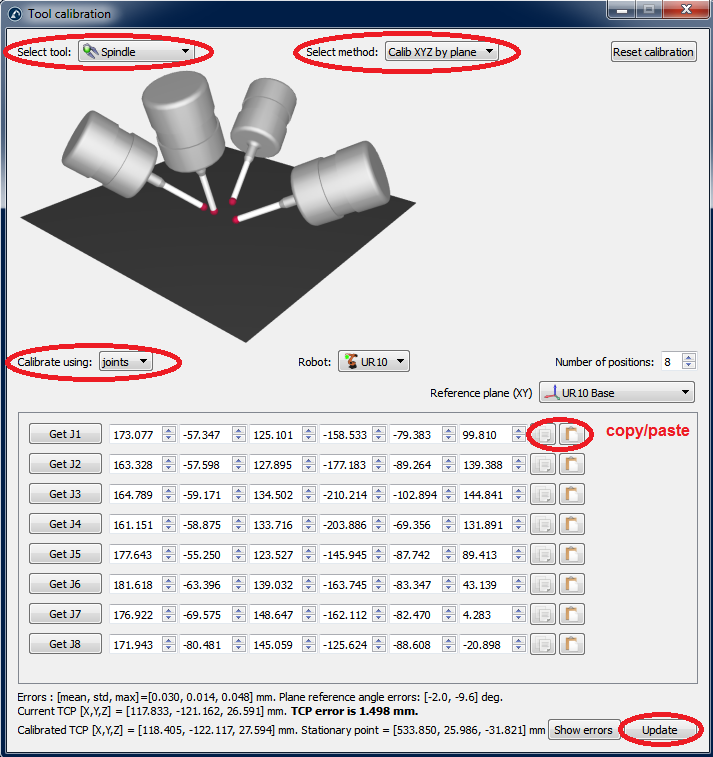
(図に示すように)平面でTCPを調整するには、次の手順に従う必要があります。
1.キャリブレーションが必要なツールを選択します。
2.校正方法を選択➔” Calib XYZ by plane”。
3.「ジョイント」を使用してキャリブレーションを選択します。
4.使用しているロボットを選択してください。
5.TCPキャリブレーションに使用する構成の数を選択します(8つ以上の構成を取ることをお勧めします)。
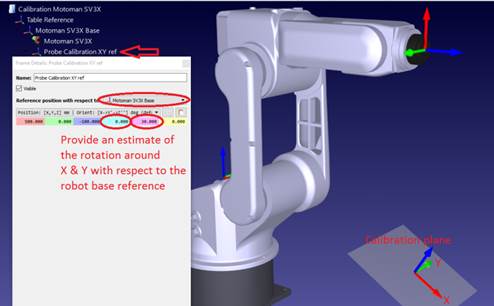
6.参照面の推定を選択します。参照面がロボットのXY平面に平行でない場合(ロボット参照から)、この参照面の推定値を±20度以内で追加する必要があります。この平面の位置は重要ではなく、方向だけが重要です。
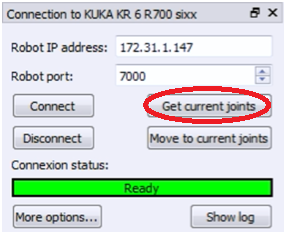
7.ジョイント値のテーブルへの入力を開始できます。手動で、またはボタンを使用してコピー/貼り付けを実行することで(図に示すように)入力できます。「Get Jx」ボタンを使用して、シミュレータのロボットから現在の関節値を取得することもできます。ロボットに接続されている実際のロボットから関節を取得する場合は、最初にロボット接続メニューから[現在の関節を取得]を選択する必要があります(RoboDKとロボットの接続の詳細については、添付の画像または付録を参照してください)。キャリブレーションに使用するジョイント(テキストファイルなど)のコピーを個別に保存することを強くお勧めします。
8.テーブルがいっぱいになると、新しいTCP値(X、Y、Z)が「キャリブレーション済みTCP」としてウィンドウの終わりに向かって表示されます。「更新」を選択すると、RoboDKステーションで新しいTCPが更新されます。この方法では、プローブの向きを見つけることができません。
9.「エラーを表示」を選択すると、計算されたTCP(すべての構成の平均)に関するすべての構成のエラーが表示されます。エラーが他の構成よりも大きい場合は、1つの構成を削除できます。
10.実際のロボットコントローラの値を手動で更新する必要があります(X、Y、Zのみ)。このTCPがRoboDKによって生成されたプログラムで使用される場合、ロボットコントローラの値を更新する必要はありません。
参照フレームのキャリブレーション#CalibCT-RedoFrame
ユーティリティを選択➔リファレンスを校正する参照フレームを較正します。異なる方法を使用して参照フレームを設定することが可能です。図の例では、参照フレームは3つのポイントで定義されています。ポイント1と2はX軸方向を定義し、ポイント3は正のY軸を定義します。
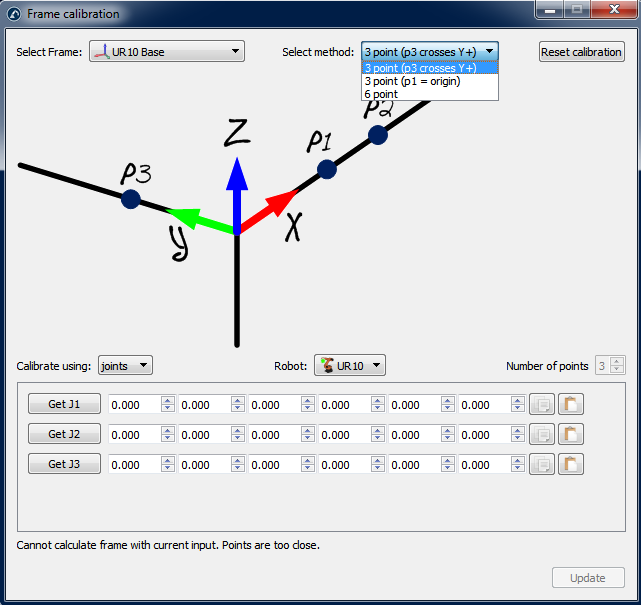
注意:リファレンスフレームのキャリブレーションに関する詳細情報は、ヒントセクション。