付録
軸1と6のマスタリング/ホーム値を復元する場合は、特別な注意を払う必要があります。これらの値は、軸1のロボットベースフレームと軸6のTCPリファレンスに直接関連しています。したがって、外部測定を行う必要があります。これらの値を適切に設定します。このウィンドウは、キャリブレーションメニューで[マスタリングプログラムの作成]を選択すると表示されます。
これらの2つの軸のマスタリングパラメータを適切に設定するには、次の2つの手順に従う必要があります。
Axis 6リファレンス#CalibCT-Mastering6
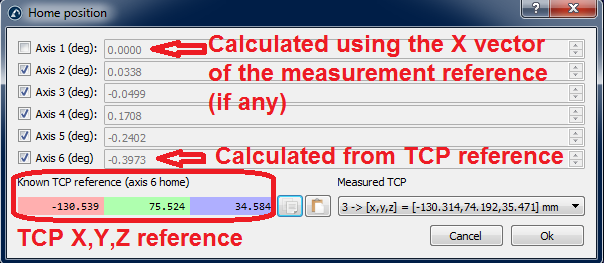
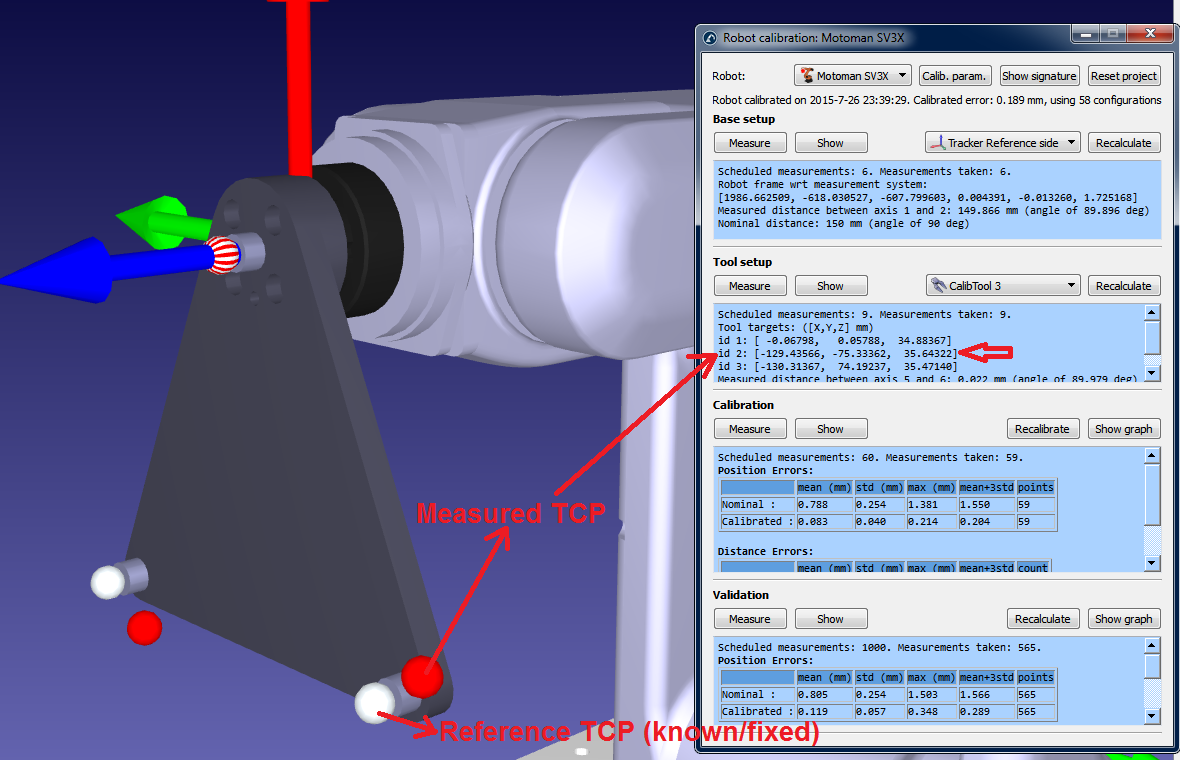
軸6の「ホーム」位置を適切に設定するには、参照ターゲットを使用する必要があります。角度オフセットは、測定されたTCP(X、Y、Z)を既知のTCPリファレンス。測定されたTCP(次の画像を参照)は、キャリブレーション手順のステップ2で測定されたTCPの1つです。参照TCPは、使用されている調整ツールのTCPの1つに対応する既知の参照です。
理想的には、リファレンスTCPは、ツールフランジに関してCMMで測定する必要があります(ロボットツールフランジのレプリカが最適です)。または、新しいロボットを使用してTCPを初めて測定し(キャリブレーション手順のステップ2)、1つの測定されたTCPを基準として使用することもできます。エンドエフェクタが常に同じ位置に配置されるようにするには、ダウエルピンや適切なツールフランジリファレンスを使用することが重要です。
Axis 1リファレンス#CalibCT-Mastering1
軸1を実際のロボットのベースフレームに合わせる場合、ロボットのキャリブレーションを開始する前に3つのベースターゲットを適切に測定する必要があります。これらのベースターゲットは、ロボットに対して参照フレームが見つかるように選択する必要があります。
軸1の「ホーム」位置は、3つのベースターゲットとロボットベースのセットアップに直接依存します。ロボットベースのセットアップは最初のキャリブレーションステップで、測定システムのベースフレームは、軸1と2を移動して測定することにより、ロボットベースフレームに対して配置されます。
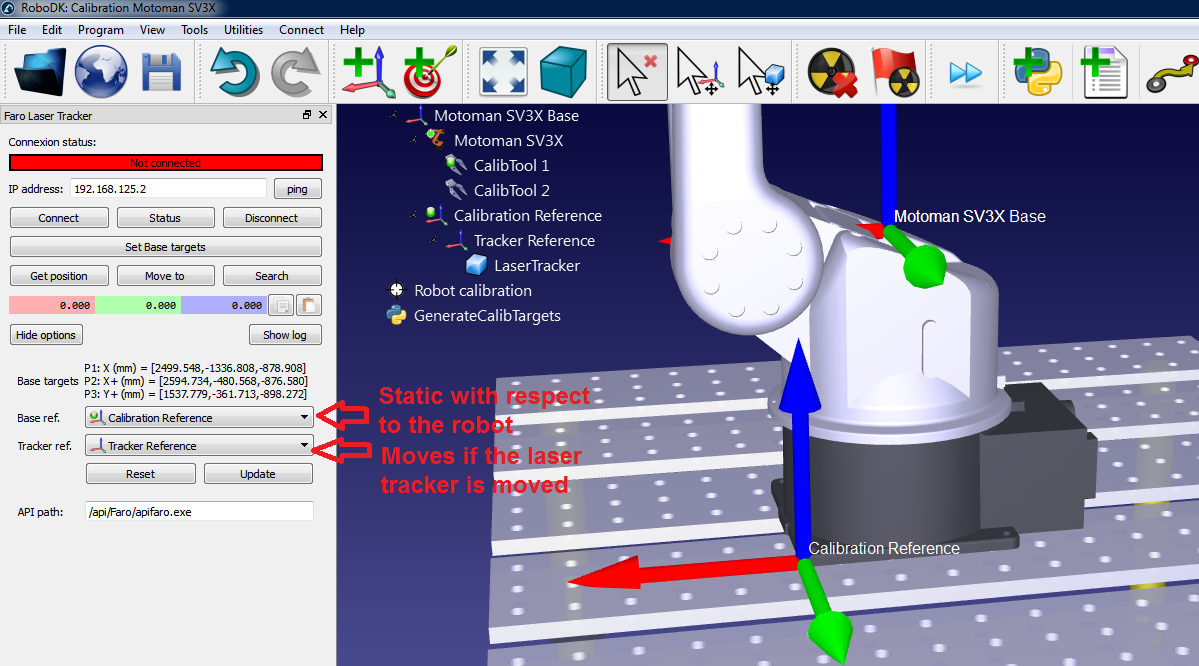
測定システムのベースターゲットは、[ベースターゲットの設定]を押すと設定できます(次の図を参照)。これらは、目的のロボット参照フレームを定義する3つの測定値です(最初の2つの測定値はX軸を定義し、3番目の点は正のY軸です)。この手順を繰り返すことができるように、ロボットベースに関連する適切な基準点を使用する必要があります。
ジョイント1の補正角度は、3点を介して測定されたベースリファレンスのX軸と、ロボット軸1および2を移動して測定されたベースリファレンスの間の角度になります。もちろん、両方のベクトルは以前に、ツリーポイントをタッチして取得したベースリファレンス。