Axis 6
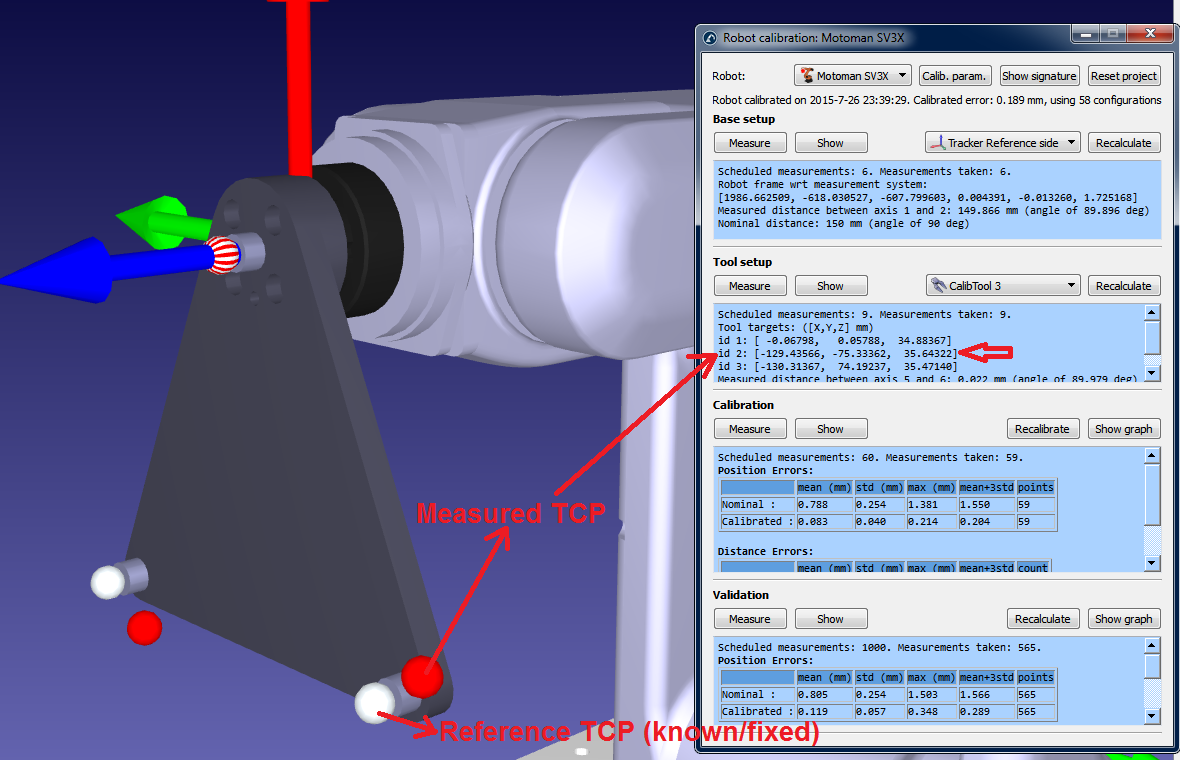
軸6の「ホーム」位置を適切に設定するには、参照ターゲットを使用する必要があります。角度オフセットは、測定されたTCP(X、Y、Z)を既知のTCPリファレンス。測定されたTCP(次の画像を参照)は、キャリブレーション手順のステップ2で測定されたTCPの1つです。参照TCPは、使用されている調整ツールのTCPの1つに対応する既知の参照です。
理想的には、リファレンスTCPは、ツールフランジに関してCMMで測定する必要があります(ロボットツールフランジのレプリカが最適です)。または、新しいロボットを使用してTCPを初めて測定し(キャリブレーション手順のステップ2)、1つの測定されたTCPを基準として使用することもできます。エンドエフェクタが常に同じ位置に配置されるようにするには、ダウエルピンや適切なツールフランジリファレンスを使用することが重要です。