Axis 1
軸1を実際のロボットのベースフレームに合わせる場合、ロボットのキャリブレーションを開始する前に3つのベースターゲットを適切に測定する必要があります。これらのベースターゲットは、ロボットに対して参照フレームが見つかるように選択する必要があります。
軸1の「ホーム」位置は、3つのベースターゲットとロボットベースのセットアップに直接依存します。ロボットベースのセットアップは最初のキャリブレーションステップで、測定システムのベースフレームは、軸1と2を移動して測定することにより、ロボットベースフレームに対して配置されます。
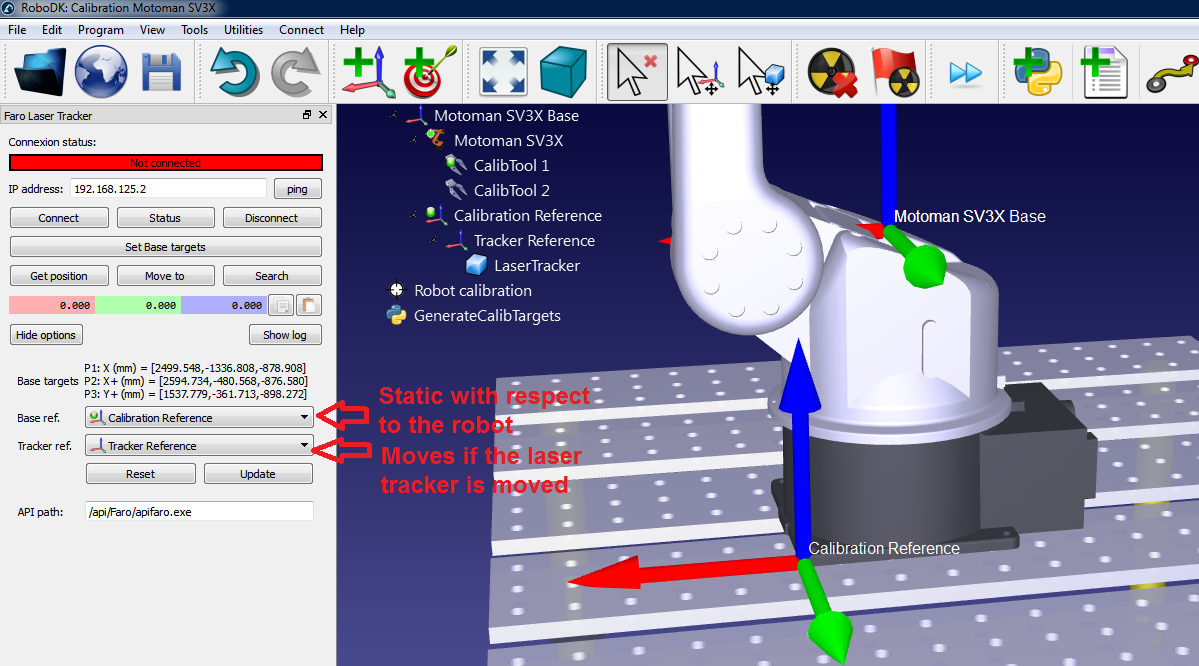
測定システムのベースターゲットは、[ベースターゲットの設定]を押すと設定できます(次の図を参照)。これらは、目的のロボット参照フレームを定義する3つの測定値です(最初の2つの測定値はX軸を定義し、3番目の点は正のY軸です)。この手順を繰り返すことができるように、ロボットベースに関連する適切な基準点を使用する必要があります。
ジョイント1の補正角度は、3点を介して測定されたベースリファレンスのX軸と、ロボット軸1および2を移動して測定されたベースリファレンスの間の角度になります。もちろん、両方のベクトルは以前に、ツリーポイントをタッチして取得したベースリファレンス。