ロボットキャリブレーションのセットアップ#
測定を行う手順を自動化するには、レーザートラッカーとロボットをコンピューターに接続する必要があります。また、レーザートラッカーを移動する場合に備えて、3点で参照フレームを測定することをお勧めします(この手順は、軸1のホームポジションを復元する場合は必須です)。附属書II 詳細については)。
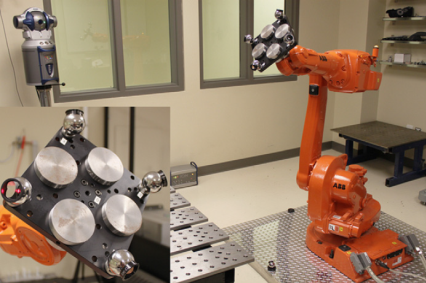
次の図に示すように、少なくとも1つのSMRターゲット(3つ以上を推奨)を接続する必要があります。レーザートラッカーを移動する必要がある場合は、3つのネストを参照フレームとして使用すると便利です。
次のサブセクションは、測定を開始する準備ができるように、順次実行する必要があります。
トラッカーに接続#CalibLT-Connect
RoboDKとの通信を適切に設定するには、レーザートラッカーのIPが必要です。次の手順に従って、レーザートラッカーとの通信を確認します。
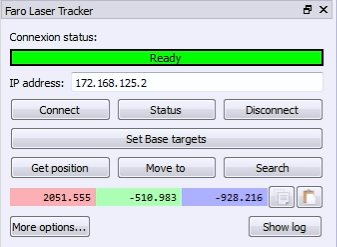
a.メニューを選択«接続➔レーザートラッカーを接続»。新しいウィンドウが開きます。
b.レーザートラッカーのIPを設定します。
c.「接続」ボタンをクリックします。
接続が成功すると、「準備完了」を示す緑色のメッセージが表示されます。ウィンドウを閉じることができ、接続はアクティブなままになります。
ロボットに接続する#CalibLT-Driver
RoboDKとの通信を適切に設定するには、ロボットのIP(またはRS232接続のCOMポート番号)が必要です。次の手順に従って、ロボットとの通信を確認します。
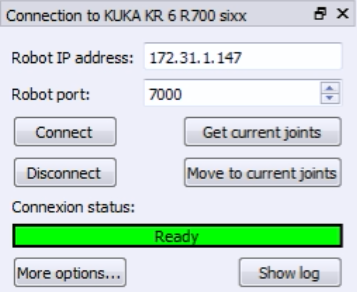
1.接続を選択➔ロボットを接続する。新しいウィンドウが表示されます。
2.ロボットのIPおよびポートを設定します(RS232経由の場合はCOMポート)。
3.[接続]ボタンをクリックします。
4.問題が発生した場合は、付録を参照してください。
注意:詳細については、 プログラムセクション。
接続が成功すると、準備完了を示す緑色のメッセージが表示されます。[現在のジョイントを取得]を選択した場合、仮想ロボットの位置は実際のロボットの位置と正確に一致する必要があります。または、[現在の関節に移動]を選択して、シミュレーターで設定された現在の位置にロボットを移動します。ウィンドウを閉じることができ、接続はアクティブなままになります。
参照ターゲットの測定#CalibLT-Reference
ロボットベースに取り付けられたキャリブレーション参照フレームを測定することをお勧めします。これは、キャリブレーション中にトラッカーを移動したり、2つのロボットキャリブレーションを比較したりする場合に役立ちます。キャリブレーション参照フレームは、3つの具体的なポイントで定義する必要があります。
ロボットに対してトラッカーを移動しない場合、または軸1のホームポジションを復元する必要がない場合は、この手順を省略できます。この場合、レーザートラッカーの参照が使用されます。
レーザートラッカーを移動するたびに、次の手順を実行する必要があります。
1.接続を選択➔レーザートラッカーを接続する。
2.レーザートラッカーのIPを設定し、[接続]を選択します(レーザートラッカーが接続されていない場合)。
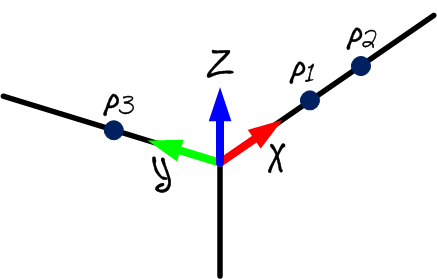
3.画像に示すように、キャリブレーション基準とトラッカー基準を設定します。キャリブレーション基準は「測定基準」とも呼ばれます。
4.[基本ターゲットの設定]を選択します。
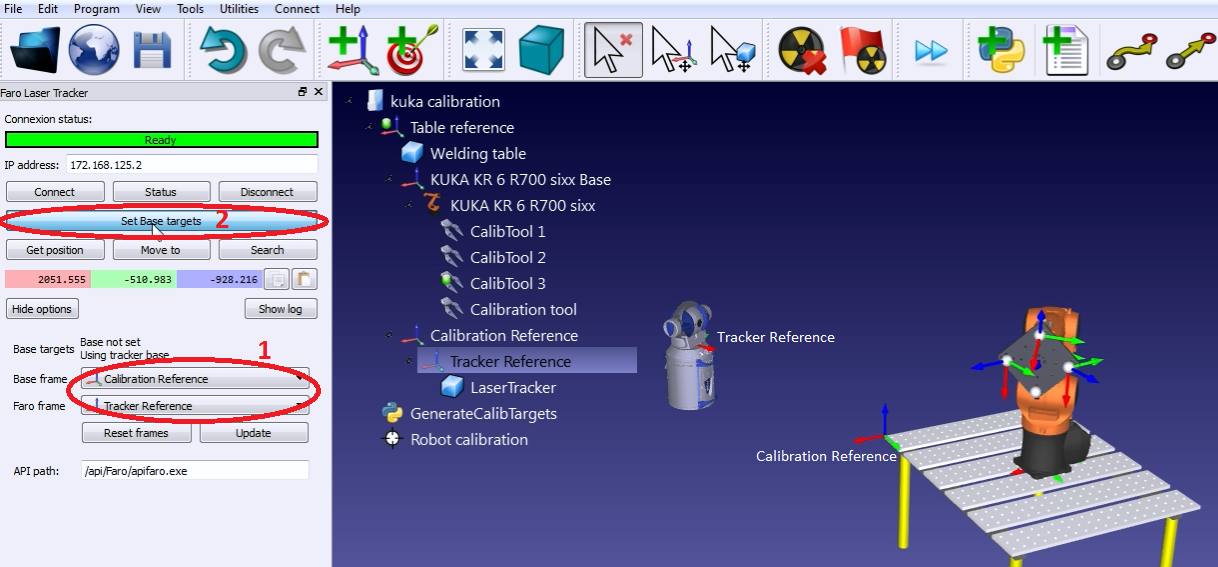
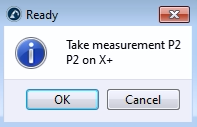
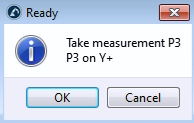
RoboDKは、次の画像に示すメニューでユーザーをガイドします。手順が完了すると、レーザートラッカーの位置が、キャリブレーション基準に対して自動的に更新されます。