参照ターゲットの測定#
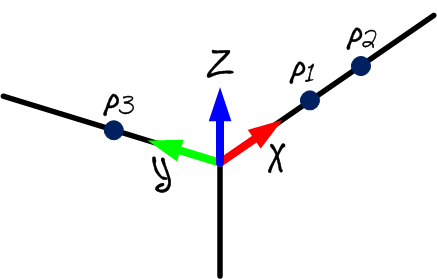
ロボットベースに取り付けられたキャリブレーション参照フレームを測定することをお勧めします。これは、キャリブレーション中にトラッカーを移動したり、2つのロボットキャリブレーションを比較したりする場合に役立ちます。キャリブレーション参照フレームは、3つの具体的なポイントで定義する必要があります。
ロボットに対してトラッカーを移動しない場合、または軸1のホームポジションを復元する必要がない場合は、この手順を省略できます。この場合、レーザートラッカーの参照が使用されます。
重要:この手順は、軸1のホームポジションを復元する場合に重要です。詳細については、付録IIIを参照してください。
レーザートラッカーを移動するたびに、次の手順を実行する必要があります。
1.接続を選択➔レーザートラッカーを接続する。
2.レーザートラッカーのIPを設定し、[接続]を選択します(レーザートラッカーが接続されていない場合)。
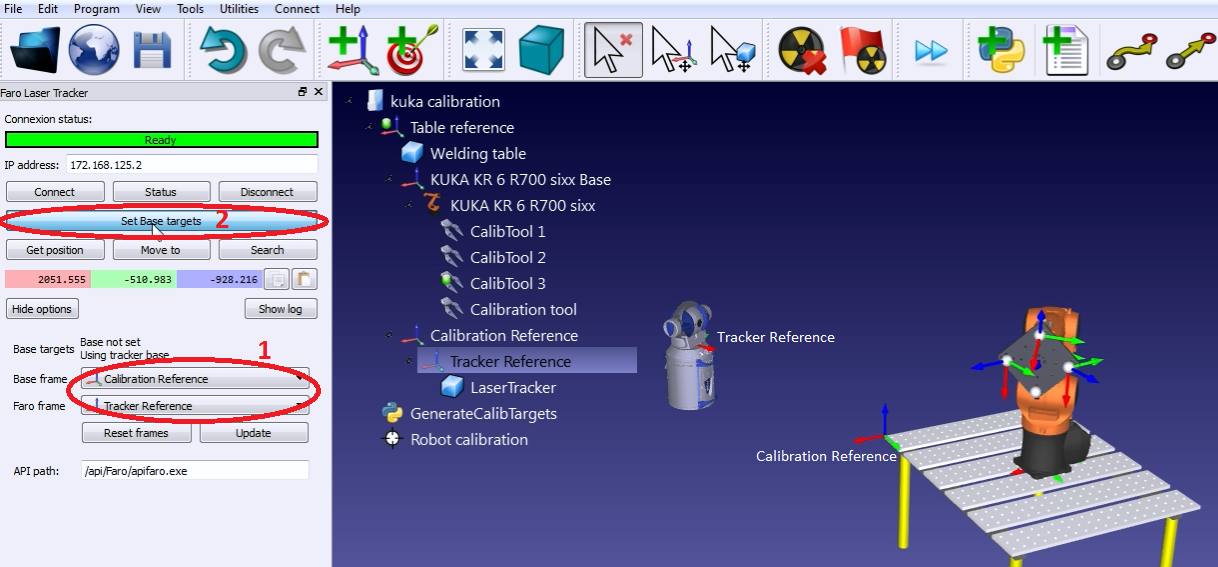
3.画像に示すように、キャリブレーション基準とトラッカー基準を設定します。キャリブレーション基準は「測定基準」とも呼ばれます。
4.[基本ターゲットの設定]を選択します。
RoboDKは、次の画像に示すメニューでユーザーをガイドします。手順が完了すると、レーザートラッカーの位置が、キャリブレーション基準に対して自動的に更新されます。