ツールの測定#
6つの測定で同じターゲットを測定する限り、測定1〜6はツールフランジの任意の場所で実行できます。その後、測定するすべてのTCPが同じTCPに対して1つの測定値を追加します。この場合、3つのTCPがあるため、合計で6 + 3 = 9の測定値になります。測定値をダブルクリックして、その位置から測定を続けることができます。
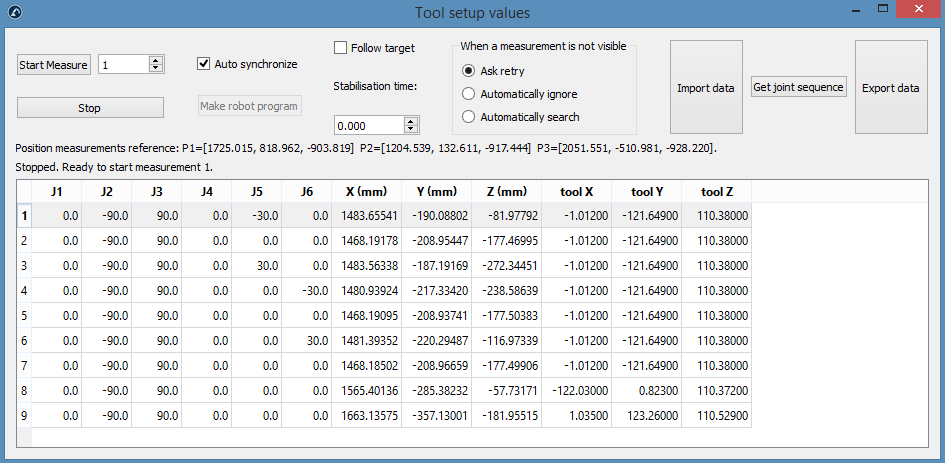
前のセクションと同様に、[ツールセットアップ]セクションで[測定]を選択します。次のウィンドウが開きます。[測定を開始]を選択すると、ロボットは計画された測定を順に実行します。測定をダブルクリックして、その位置から測定を続行します。
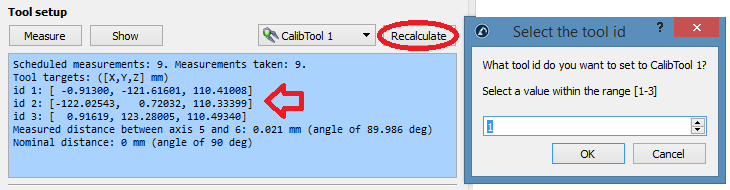
手順が完了すると、要約に調整済みTCPが表示されます。TCPの定義(次の画像「CalibTool 1」)は自動的に更新されます。TCPを選択しなかった場合は、新しいTCPを追加できます(「プログラム➔空のツールを追加」)、「再計算」を選択します。新しいウィンドウが表示され、測定した順序に応じてツールの「ID」を選択する必要があります。同じ手順を繰り返して、必要な数のTCP(この場合は3つのTCP)を更新できます。ツールの名前が数字で終わる場合、ツールのIDは自動的に検出されます。