付録
ロボットのキャリブレーションでは、測定システムを使用してロボットから測定値を取得する必要があります。これらの測定を行うには、コンピューターと通信するFaroレーザートラッカーが必要です。通信は、コンソールモードで実行できるドライバexeファイルを介して行われます。
たとえば、Faroは「Tracker Utilities」と呼ばれる無料のアプリケーションを提供しています。このアプリケーションは、レーザートラッカーを初期化し、とりわけヘルスチェックを実行できます。
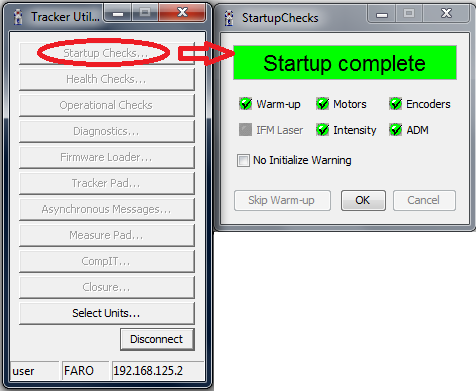
トラッカーを初期化するには、「トラッカーユーティリティ」アプリケーションを起動し、トラッカーIPを使用して接続してから、「スタートアップチェック」を選択します。トラッカーが初期化されるとき、初期化の前に1.5インチSMRターゲットを「ホーム」位置に配置する必要があります。そうしないと、初期化後に緑色のライトが点滅し、測定が無効になります。
初期化が完了したら、次の図に示すように、「スタートアップが完了しました」メッセージを読む必要があります。

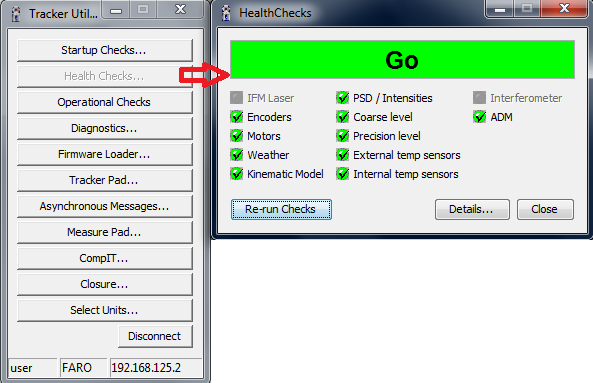
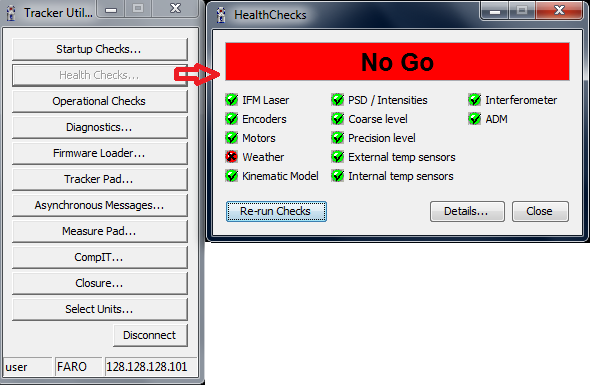
トラッカーで問題が発生した場合は、「ヘルスチェック…」を押してヘルスチェックを実行できます。次の2つの画像は、それぞれ成功チェックと失敗チェックを示しています。場合によっては、ケーブルを再接続してLaser Trackerを再起動すると、問題が解決することがあります。
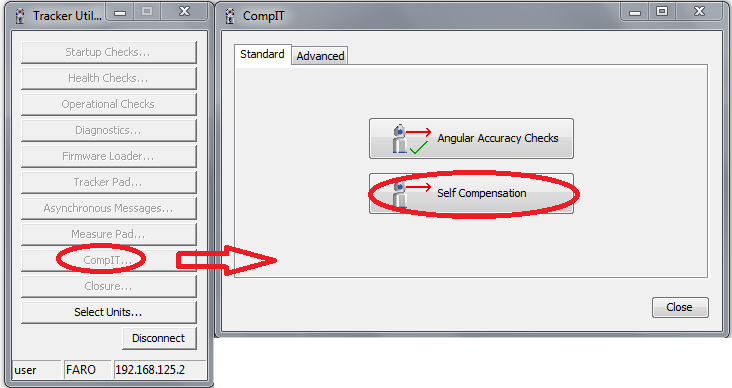
注意:時々、トラッカーの自己補正を実行することをお勧めします。この補正では、トラッカーヘッドのいくつかの基準点を使用して、測定システムを自動較正します。または、角度精度チェックを実行して、レーザートラッカーの精度を検証することもできます。
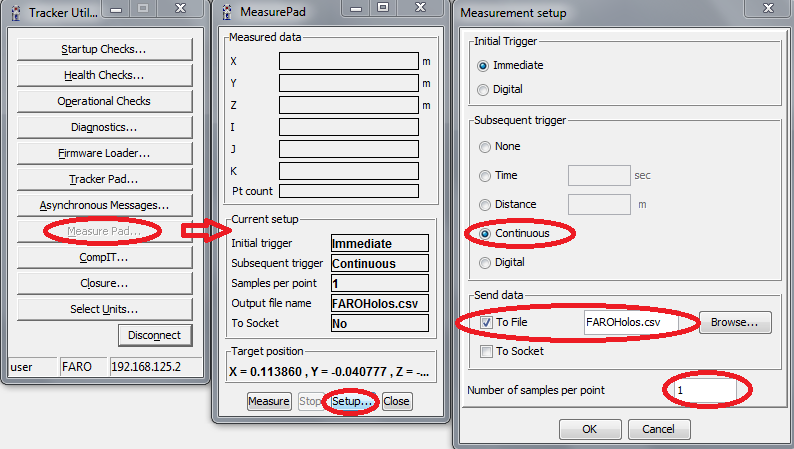
最後に、「測定パッド」を使用していくつかの測定を行うことができます。レーザートラッカーはターゲットを追跡し、XYZ位置を1000 Hzのレートで測定できます。ポイントごとに1つのサンプルを設定し、連続トリガーを設定すると、トラッカーは1秒あたり1000回の測定をCSVファイルに記録します。
この機能を使用してロボットの経路を測定し、RoboDKの経路精度チェックを使用して、経路に沿った精度、速度、加速度を確認できます。