ロボットドライバーをカスタマイズする
ロボットドライバーは、デフォルトでは/ RoboDK / api / Robot /フォルダーにあります。RoboDKは、ロボット接続設定で特定のドライバーにリンクします。
1.ロボットを右クリック
2.選択する 
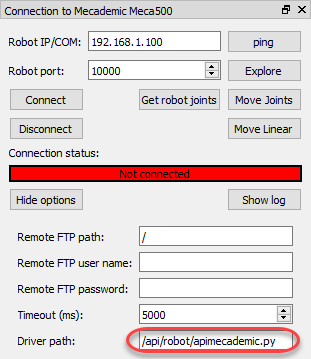
3.その他のオプションを選択…
4.(ドライバーパス)セクションでドライバーパスのパスを検索または入力します
1つのロボットドライバーは、スタンドアロンコンソールアプリケーションです。ロボットドライバーは、任意のプログラミングプラットフォームを使用して開発できます。たとえば、Pythonモジュール(PY形式)または任意の開発環境で構築された実行可能プログラムを使用できます。
ロボットドライバーを使用すると、コマンドラインを介してロボットと通信できます。RoboDKでは、手動で実行できる同じコマンドを使用して、PCからロボットを駆動します。各ロボットドライバーは、コンソールモードで実行してテストできます。
Mecademicロボットを制御するためのソースコードを含むサンプルPythonドライバー(apimecademic.py)は、C:/ RoboDK / bin / robot /にあります。
apimecademic.pyファイルをダブルクリックして、モジュールをコンソールモードで実行します(Pythonをインストールする必要があります)。ドライバは新しいコマンドを待ちます。たとえば、次のコマンドを入力して、IPと通信ポートを指定してロボットに接続できます。
接続192.168.100.1 10000
接続が成功すると、SMS:Readyメッセージが表示されます。次に、次のコマンドを入力して、現在のロボットの関節を取得します。
CJNT
MOVJ、MOVL、SETTOOLなどの他のコマンドを入力して、ロボットを移動したり、TCPを更新したりすることもできます。
MOVJ 10 20 30 40 50 60
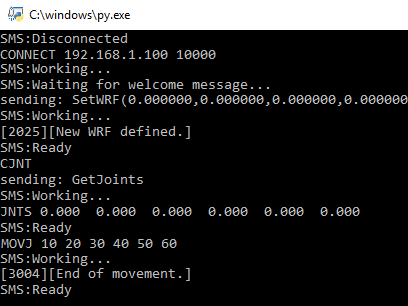
一部のロボットは、リアルタイムでの関節位置の監視をサポートしています。この場合、JNTS_MOVINGコマンドを送信することで、ロボットの移動時に関節位置のフィードバックを提供できます。RoboDKからドライバーを実行すると、仮想ロボットは実ロボットの動きをリアルタイムで追跡します。新しいコマンドは、Readyメッセージが送信されるまで処理されません。
注意:ドライバーをRoboDKから実行すると、接頭辞SMS:を付けて送信されたメッセージはすべて接続ステータスバーに表示されます。特定のメッセージは、Ready(緑色)、Working(黄色)、Waiting(青色)などの特定の色で表示されます。他のメッセージはすべて赤で表示されます。
コンソールとの相互作用とロボットへの接続は、Mecademicドライバー用の1つのPythonモジュールによって管理されます。このセクションで説明するように、コンソールとの対話はすべてのロボットで同じでなければなりません。ただし、各ロボットとの相互作用はロボットの製造元によって異なります。この場合、Meca 500プログラミングマニュアル適切なコマンドを送信します。これらのコマンドは、Meca 500ロボットの移動と監視を可能にします。