ロボットドライバーの使用方法
このセクションでは、ロボットドライバーを使用してRoboDKから実際のロボットアームに接続し、いくつかの簡単な操作を実行する方法を示します。
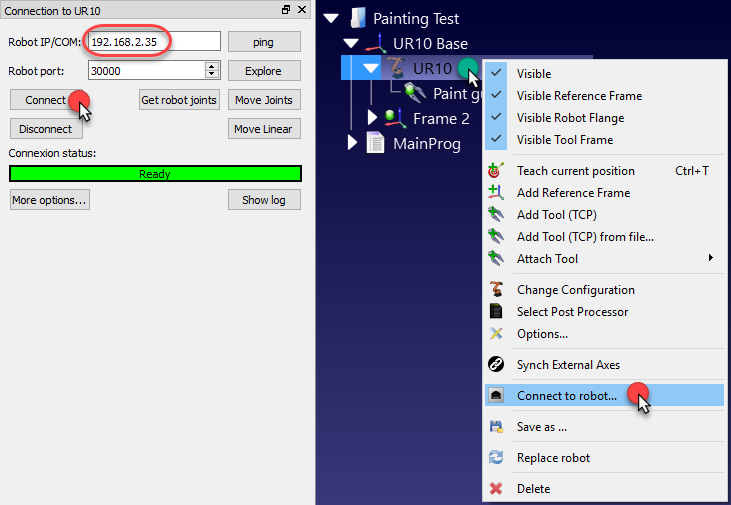
1.ロボットを右クリック
2.選択する
3.ロボットのIPを入力してください
4.接続を選択
接続が成功すると、次の図に示すように、準備完了を示す緑色のメッセージが表示されます。
注意:を使用して作成されたプログラム RoboDK APIロボットをリアルタイムで動かすためにも使用できます。詳細については、APIでのドライバーの使用。
注意:の トラブルシューティング 接続が機能しない場合のセクションで詳細を説明します。
GUIの使用
グラフィカルユーザーインターフェイス(GUI)を使用して作成されたロボットプログラムは、次の手順に従ってロボットで実行できます。
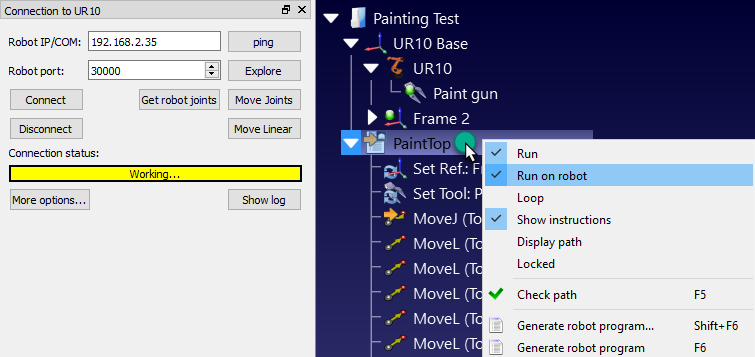
1.右クリック
2.[ロボットで実行]オプションをチェックします
3.プログラムをダブルクリックして開始します
プログラムは実際のロボットで開始し、シミュレーターはロボットの動きを追跡します。ロボットがビジー状態のとき、接続ステータスは黄色で作業中…と表示されます。
注意:プログラムアイコンが次の図のように更新され、プログラムがロボットで実行されていることが示されます。
の使用 API
ロボットの動きを制御することが可能RoboDK APIたとえば、PythonプログラムまたはC#アプリケーションからロボットをプログラムする場合。
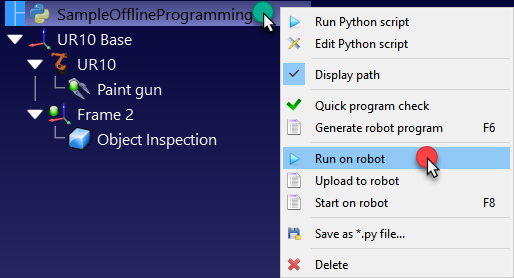
[ロボットで実行]オプションは、RoboDKからPythonプログラムを実行すると自動的に管理されます。ロボットでPythonプログラムを実行するには、次の手順に従います。
1.右クリック 
2.選択する 
プログラムがロボットで実行を開始し、それに応じてロボットの接続ステータスが更新されます。
プログラムがRoboDKのGUIの外部で実行される場合(デバッグの目的で、または例えばC#用のRoboDK APIを使用している場合)、次を使用してRunModeを設定できます。RDK.setRunModeRUNMODE_RUN_ROBOTに。これにより、プログラムがロボットで実行されます。を使用して接続を確立することも可能ですrobot.Connect()。
注意: RoboDKは、Pythonプログラムが生成されるか、GUIを使用してロボットで実行するように設定されていない限り、デフォルトでRoboDK APIが開始されてRunTypeをRUNMODE_SIMULATEに自動的に設定します。
次のコードは、APIから直接ロボットとの接続を確立する簡単な例を示しています。
#RoboDK APIを起動します
RDK = ロボリンク()
ロボット = RDK。項目(」、ITEM_TYPE_ROBOT)
#デフォルトの接続パラメータを使用してロボットに接続します
成功 = ロボット。接続する()
状態、 status_msg = ロボット。ConnectedState()
もし 状態 != ROBOTCOM_READY:
#接続が成功しなかった場合は停止します
上げる 例外("接続に失敗した: " + status_msg)
#ロボットでロボットコマンドを実行するように設定
RDK。setRunMode(RUNMODE_RUN_ROBOT)
#注:これは、使用すると自動的に設定されます
#APIを介したrobot.Connect()
#ロボットを動かす:
ロボット。MoveJ([10、20、30、40、50、60])
注意: に示すように、GUIを使用して手動でトリガーできるのと同じ方法で、RoboDK APIからGUIを使用して作成されたプログラムをトリガーすることもできます。 前セクション。次の例は、その方法を示しています。
prog = RDK。項目(「メインプログラム」、 ITEM_TYPE_PROGRAM)
prog。setRunType(PROGRAM_RUN_ON_ROBOT) #run on robotオプションを設定する
#シミュレータでのみ実行するには、PROGRAM_RUN_ON_SIMULATORに設定します
prog。RunProgram()
ながら prog。忙しい() == 1:
一時停止(0.1)
印刷する(「プログラム完了」)