ロボット製造
この項目では、ロボット加工用に単純なRoboDKプロジェクトをオフラインで準備する方法を示します。ロボット加工セルには、少なくとも1つのロボット、1つのツール(EOAT)、および1つの参照系(基準系または基準座標系とも呼ばれます)が必要です。RoboDKでの新しいプロジェクトの作成に関する詳細は、スタートアップガイドの項目を参照にしてください。
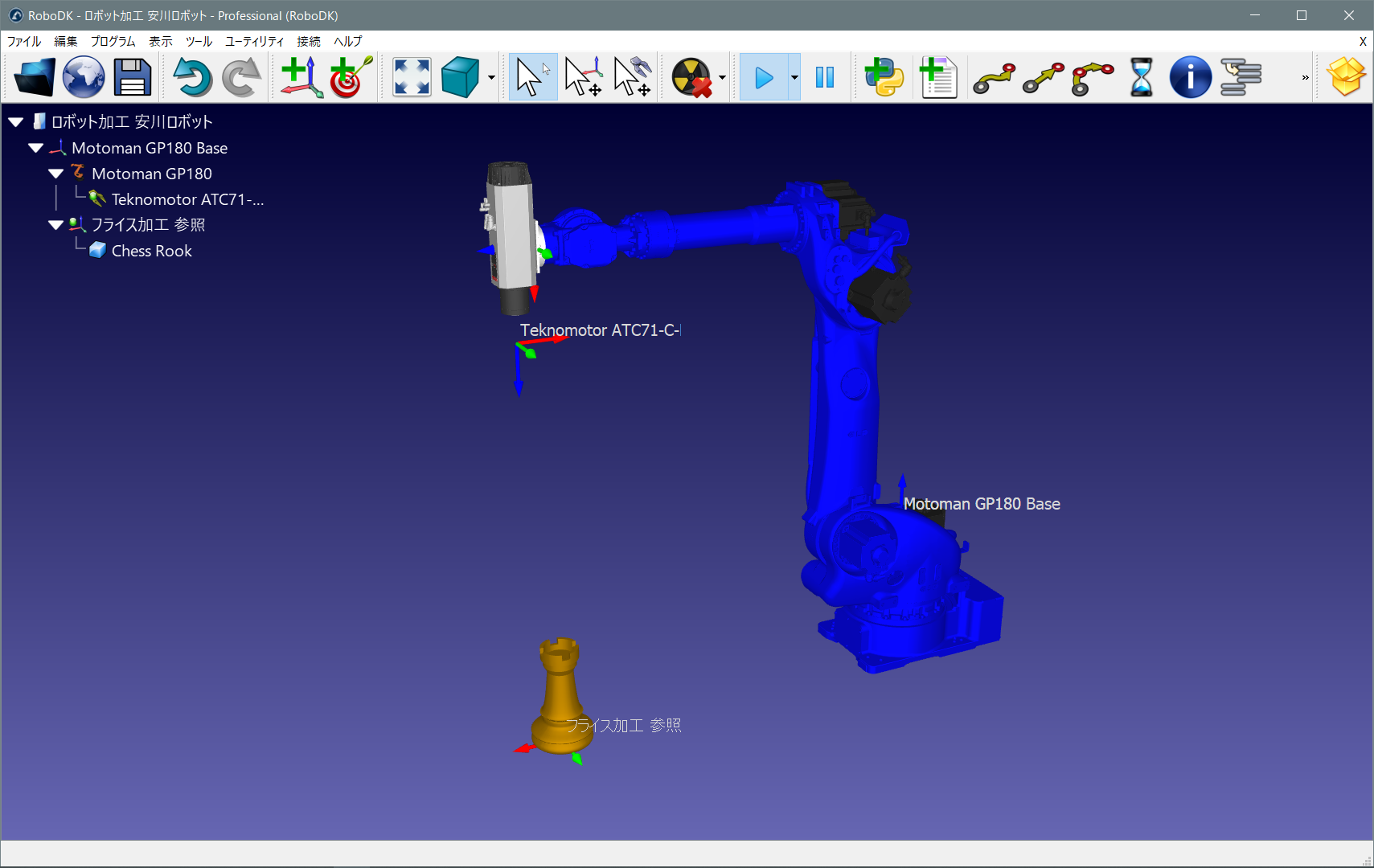
次の手順は、KUKA KR210ロボットとTeknomotorのミーリング主軸を使用してロボット加工のセットアップを準備する方法を示しています(この例は、Sample-New-Project.rdkとしてライブラリにあります)。
1-ロボットを選択:
a.ファイル➔![]() オンラインライブラリを開くを選択。
オンラインライブラリを開くを選択。
b.フィルターを使用して、ロボットをブランド、ペイロード、…などで検索できます
例えば、KUKA KR210 R2700(ペイロード210 Kg、リーチ2.7 m)を選択します。
c.ダウンロードを選択すると、ロボットが自動的にメイン画面に表示されます。
2-ツールを選択:
a.同じオンラインライブラリのフィルターをリセットしてから、タイプを➔ツールでフィルターしてください。
b.ダウンロードを選択して、Teknomotor ATC71-C-LNなどのスピンドルツールを読み込みます。
c.スピンドルは自動的にロボットに取り付けられます。
d.オンラインライブラリウィンドウを閉じてください。
3-参照系を追加:
a.ロボットの土台を表す座標系(名前はKUKA KR210 R2700 Base)を選択します。
b.プログラム➔![]() 参照系を追加を選択。新しい参照系がロボットの土台に追加されます。
参照系を追加を選択。新しい参照系がロボットの土台に追加されます。
c.参照をダブルクリックして、座標を入力します:
XYZABC = [1500,1000,500,0,0,0](mm-deg)
d.新しい名前を入力するか、F2を押して、参照系の名前をフライス加工の参照に変更します。
4-ロボット加工に使用するオブジェクトを追加(任意):
a.ファイル➔![]() 開くを選択
開くを選択
b.RoboDKライブラリからObject Chess Rook.sldという名のオブジェクトを選択します:
C:/RoboDK/Library
c.オブジェクトが(プロジェクトツリー内で)自動的にフライス加工の参照に配置されていない場合は、オブジェクトをドラッグアンドドロップしてください。
5-ロボットをダブルクリックして、ロボットパネルを表示します(任意)。ロボットパネルは、有効なツールと参照系を表示します。ツールと参照系を選択して更新することによって、ロボットコントローラーに同じ座標が表示されるはずです。デフォルトで、TeknomotorスピンドルのTCPはツールホルダーのルートにあります。ツール(TCP)には一定の長さがあります。この例では、ツールカッターの長さを表すようにTCPを更新します。
a.ツール(TCP)のX座標を375 mmに更新。TCPが軸に沿って移動するのがわかります。
b.(任意)2つ目のツールを作成して、Z軸に沿って移動させれば、最初のツールに相対するTCPを定義することもできます。
c.ロボットパネルウィンドウを閉じてください。
