ロボット製造
RoboDKを使用して、三次元空間でロボットに曲線を辿らせることができます。RoboDKの曲線は、オブジェクトの端またはCSVファイルとして点の一覧をインポートする事ができます。この設定は、ロボット溶接などのアプリケーションに役立ちます。
ユーティリティ➔曲線を辿るプロジェクトを選択して、曲線を辿る設定を開きます。これらの設定は、ロボット加工プロジェクトと同じです。唯一の違いは、既にパス入力が曲線を選択に設定されていることです。
画面上の曲線を選択するには、曲線を選択ボタンを選択してください。

マウスの左クリックで曲線を選択します。同じ曲線を2回選択する事で、移動方向が切り替わります。また、選択済みの曲線を右クリックすると、方向転換したり、選択を解除したりできます。

画面を右クリックして完了を選択するか、Escキーを押して設定メニューに戻ります。緑色の経路は、オブジェクトに対してロボットの動きを示します。
ツールの速度や、接近/後退移動を各曲線に適用するかどうかなどの、追加の設定が設定ウィンドウの右上にあります。次の画像でデフォルトの設定が示されています:

ユーティリティ➔曲線をインポートを選択して、CSVファイルまたはテキストファイルから曲線をRoboDKにインポートできます。プロジェクトに新しいアイテムが表示され、オブジェクトとして曲線が追加されます。


ファイルは、各点の三次元座標を含むテキストファイルである事もできます。任意ですが、ツールのZ軸の方向をi,j,kベクトルとして指定できます。
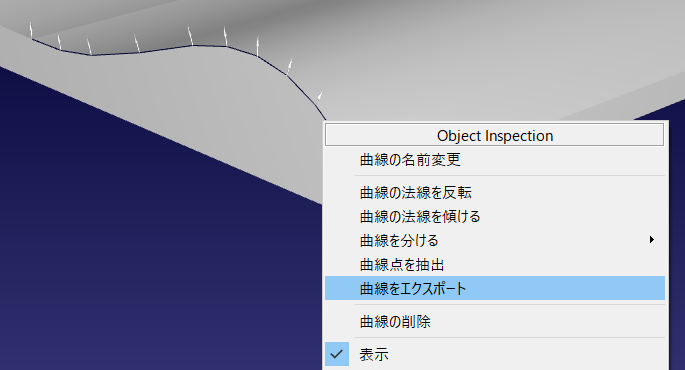
必要に応じて、オブジェクトに既存する曲線をCSVファイルとしてエクスポートし(曲線を右クリックして、曲線をエクスポートを選択)、編集してからRoboDKに再インポートできます。
CSVまたはTXTファイルを曲線または点としてのインポートをカスタマイズする方法については、RoboDK APIの実例項目にあります。