IO
プログラム➔
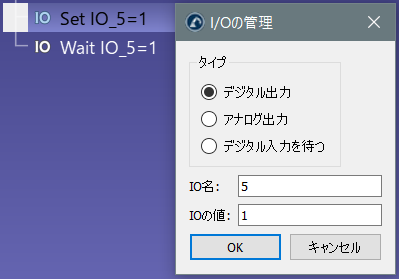
IO名は数値または名付けられた変数であれば、テキスト値にすることもできます。IO値は、数値(Falseの場合は0、Trueの場合は1)または名付けられた状態の場合はテキスト値です。
メモ: この指示は、一部のロボットコントローラーでアナログ出力(AO)の設定またはアナログ入力(AI)の待つもサポートしています。その場合は、数値の代わりに十進数または特定のテキストで指定できます。
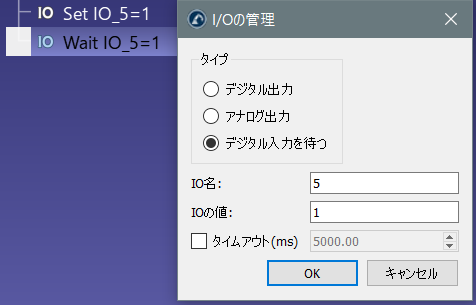
入力が特定の値に変化するまでプログラムの実行を停止するには、デジタル入力を待つに設定します。さらに、ほとんどのロボットコントローラーは、待ち時間が特定の値を超えた場合にエラーを発生させるタイムアウト遅延をサポートしています。この機能を有効にするには、タイムアウト(ms)設定をチェックしてください。
ヒント: 例えば、ロボットのセルに特定のハードウェア(グリッパーやミーリング主軸など)がある場合、デジタル出力(DO)を使用してこの特定のハードウェアを有効にし、特定のデジタル入力(DI)を待ってから専用の状態に切り替えることをお勧めします。
シミュレートされたデジタル入力と出力を変更すると、新しいプロジェクト変数が作成されます。これらの変数の状態を確認するには、プロジェクトを右クリックして、プロジェクトパラメータを選択します。APIを通してこれらの変数を読み取りまたは変更することもできます。