関節移動
プログラム➔
指示を追加する前にターゲットを選択しない限り、移動指示とリンクされた新しいターゲットを作成します。そのターゲットを動かすと、ロボットの動きも変わります。
これがプログラムに追加される最初の指示である場合、移動指示の前に2つ指示がさらに追加されます:参照系を選択とツールの座標系を選択。これにより、プログラムが移動指示に到達した時、ロボットが作成された新しいターゲットと同じ参照系とツールの座標系を使用していることを保証します。
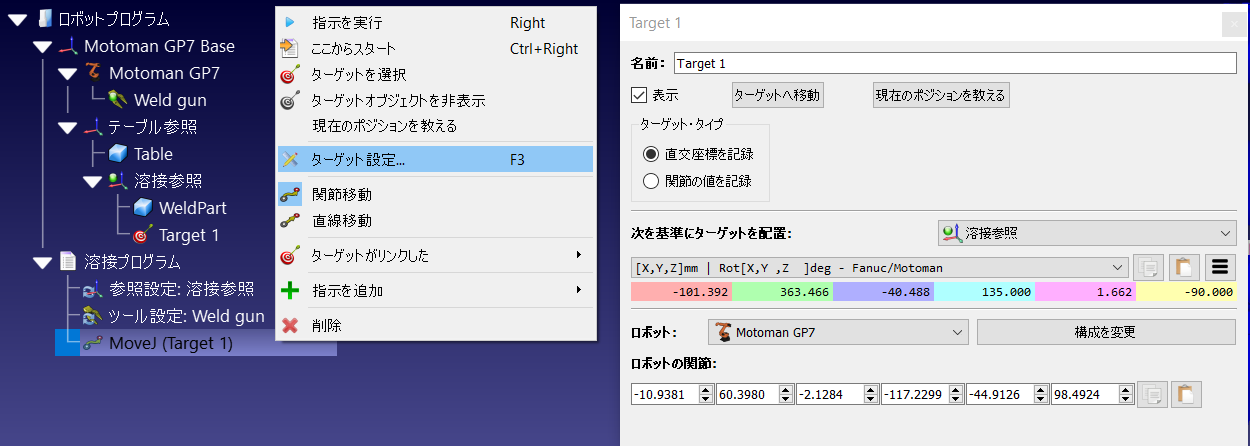
メモ:移動指示を右クリックして、ターゲット設定…(F3)を選択すれば、ターゲットの設定メニューが開きます。ターゲットは、このウィンドウまたは3Dビューから変更できます。