直線移動
プログラム➔
指示を追加する前にターゲットを選択しない限り、移動指示とリンクされた新しいターゲットを作成します。そのターゲットを動かすと、ロボットの動きも変わります。
関節と直線移動は似たような動作をする為、二つのタイプの間を簡単に切り替えることができます。
関節移動の指示同様に、これがプログラムに追加される最初の指示である場合、移動指示の前に2つ指示がさらに追加されます:参照系を選択とツールの座標系を選択。
重要:各プログラムの最初の動きは、間節ターゲットを使う関節移動の使用をお勧めします。これにより、しっかり最初から適切な構成を設定し、シミュレーションと同じように実際のロボットが動くことを確かめます。
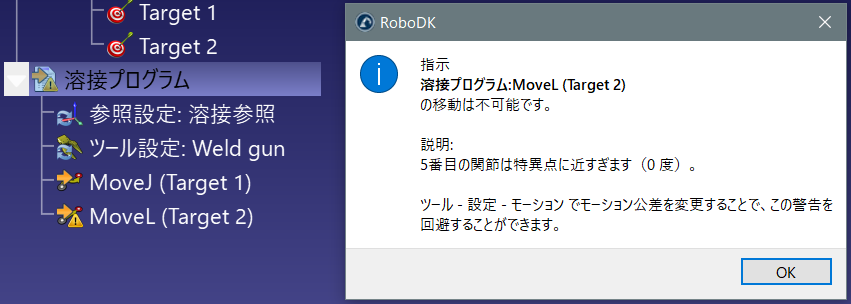
関節移動と違って直線移動は、ロボットの特異点と軸の限界に敏感です。例えば、6軸ロボットは、直線移動の途中で特異点を越えることはできません。次の画像は、5番目の関節が(0度の)特異点に近すぎることを示しています。[…]代わりに関節移動の使用を考えましょう。次の画像で示すように。
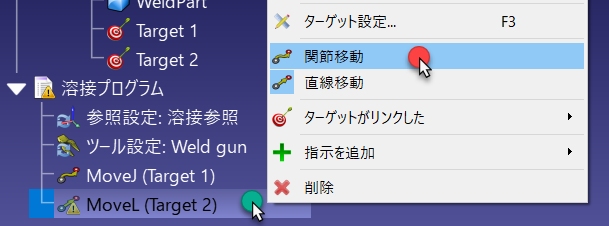
直線移動が絶対に必要でない場合は、移動命令を右クリックして、関節移動指示に変更しましょう。
あるいは、特異点を回避する為に、ターゲット、TCP、または参照系の位置を変更する必要があります。