RoboDK
テストをオフラインで準備するには、次の手順に従う必要があります。
1.ロボットを選択します。
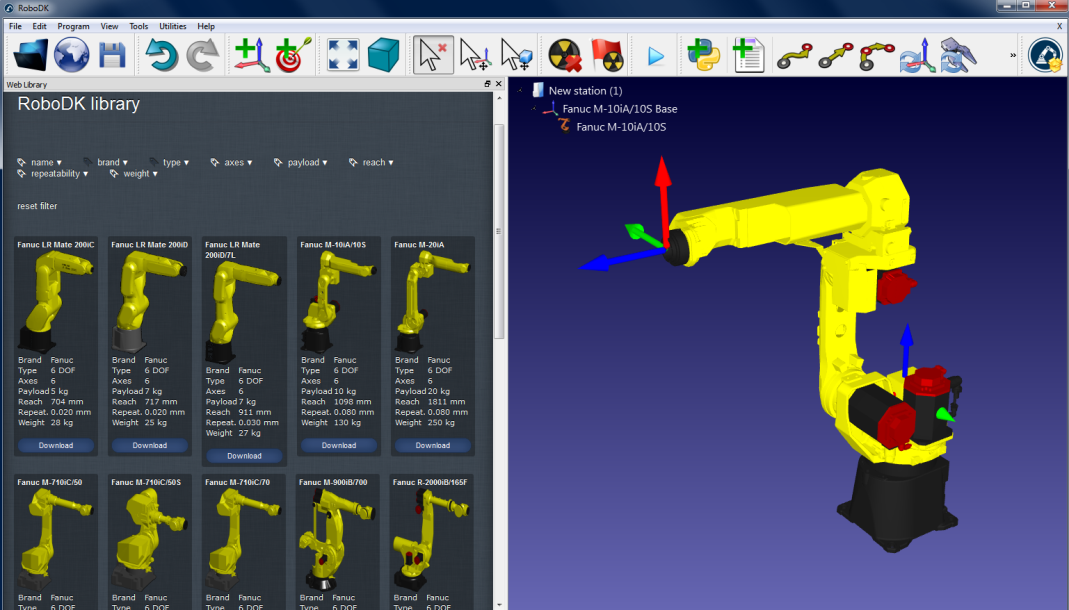
a.ファイルを選択➔オンラインライブラリを開く。ロボットのリストを含むウィンドウが表示されます。
b.(オプション)フィルターを使用してロボットの選択を絞り込みます。
c.ロボットを見つけ、[ダウンロード]を選択します。
または、ファイルを選択します➔開いた…コンピュータでロボットファイルを選択します。このファイルはWebサイトからダウンロードできます。https://robodk.com/library またはロボットのキャリブレーションプロジェクトの後に取得します。
2.ステーションにボールバーテストモジュールを追加します。
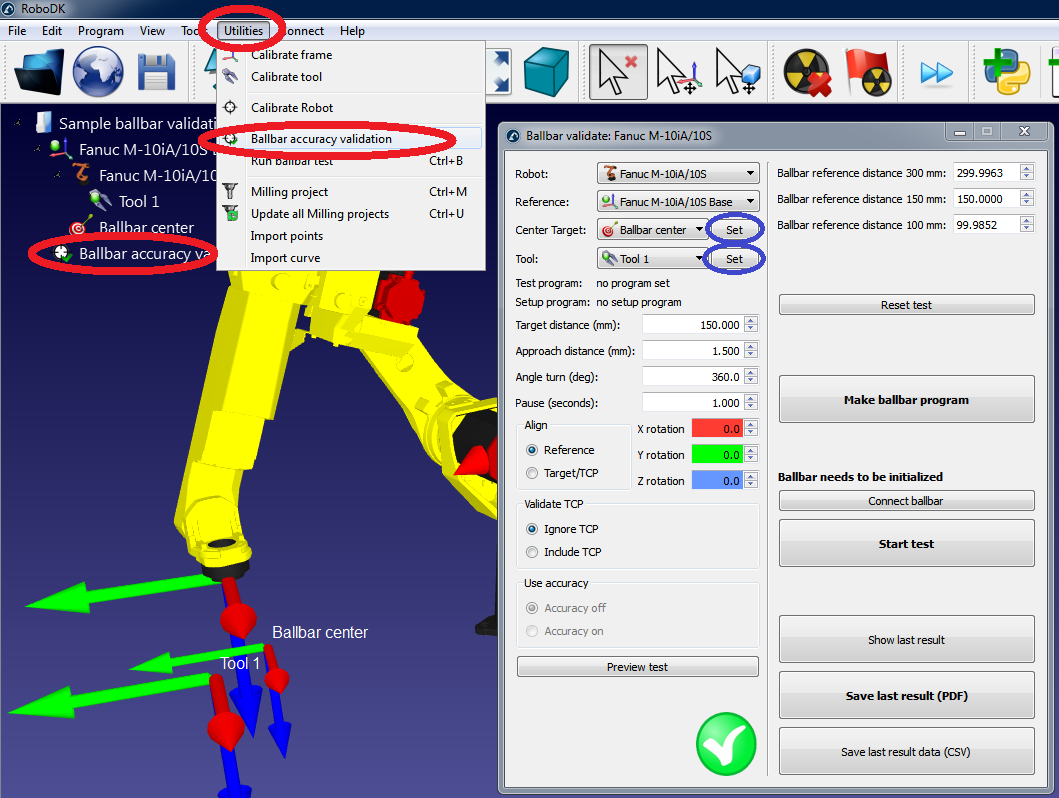
a.ユーティリティを選択➔ボールバー精度テスト
b.次のウィンドウが表示され、ターゲットのボールバーの中心が自動的に作成されます。ロボットにTCPがない場合、TCPツール1も自動的に作成されます。
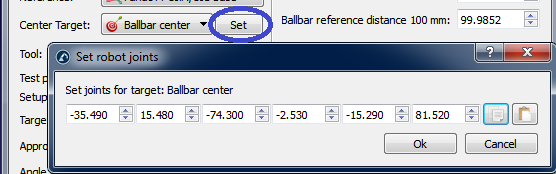
3.ボールバーテストの中心(ターゲットボールバーの中心)のロボットジョイントを挿入します。
a.ターゲットのボールバーの中心の横にある[設定]を選択します。
b.ロボットの関節(関節軸1〜6)を入力します。
c.OKを選択します。
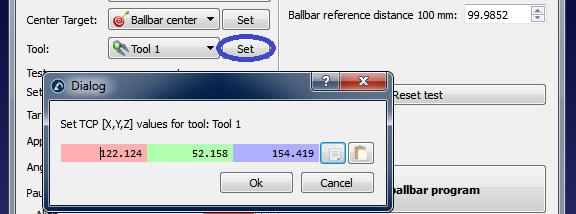
4.TCP座標を入力します。
a.選択したツール(この例ではツール1)の横にある[設定]を選択します
b.TCPのX、Y、Z座標を入力します(ロボットのエンドエフェクターを基準にして)
c.[OK]を選択します
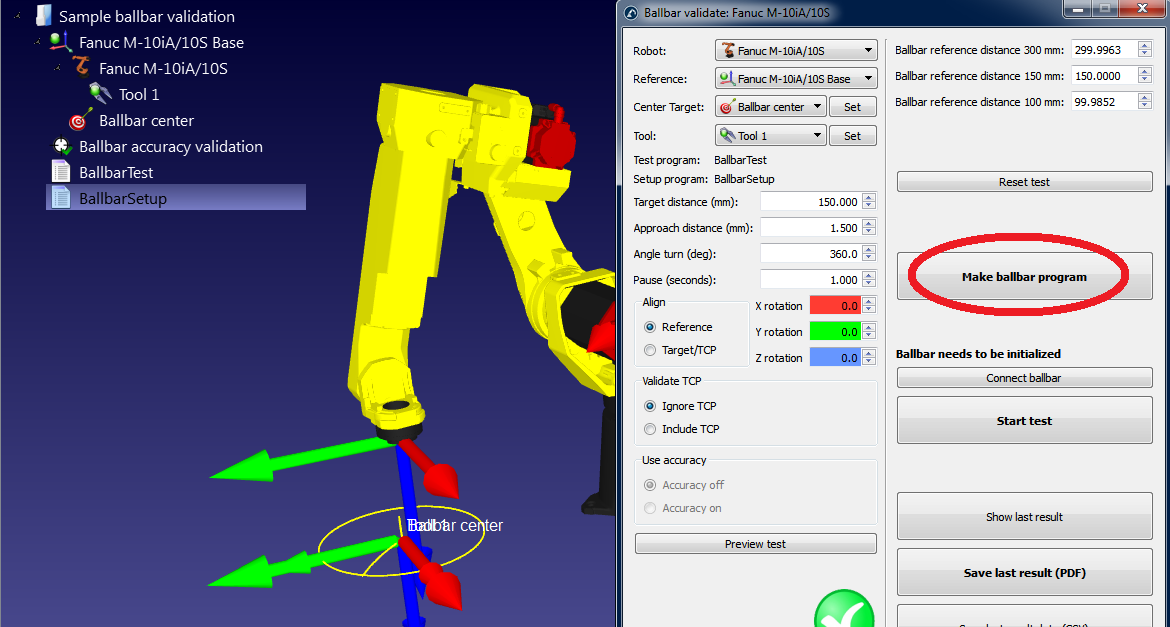
5.プログラムを生成します。
a.[ボールバープログラムの作成]を選択すると、プログラムが作成されます。実際には、2つのプログラムが表示されます。
i.BallbarSetup:このプログラムは、以前に配置されたのと同じ場所に中心のツールカップのピボットポイント(円の中心)を配置するために使用されます
ii.BallbarTest:このプログラムは、ボールバーでデータを取得するためのピボットポイント(円の中心)の周りに円を作成するために使用されます
b.新しく生成されたプログラムをダブルクリックします。RoboDKは、プログラムを実行するロボットをシミュレートします。
ボールバーテストがデフォルト設定で実行できない場合は、テストパラメータを変更できます。これらの設定を変更する方法については、次のセクションを参照してください。
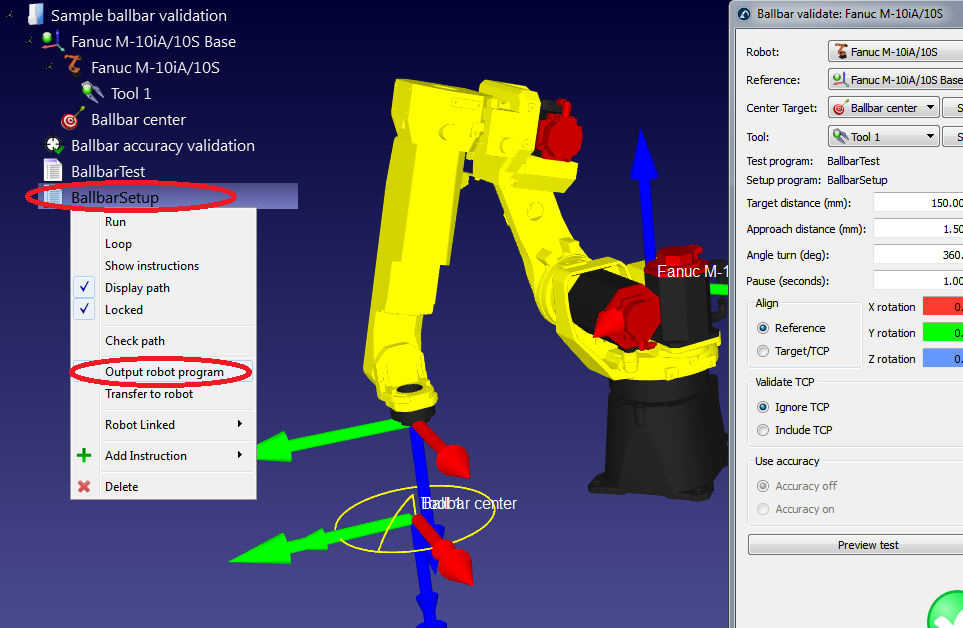
6.ロボットプログラムがお好みになったら、ロボットのプログラムファイルを生成できます。
a.BallbarTestプログラムを右クリックします。
b.[ロボットプログラムの生成]を選択します
c.BallbarSetupプログラムについて繰り返します(すべてのプログラムは、F6を押すことにより、デスクトップ上で自動的に生成できます)。
d.その後、プログラムをUSBディスクに保存し、ロボットに転送できます。FTP接続は、ほとんどのロボットでも使用できます。
7.最後に、ファイルを選択します➔ステーションを保存RoboDKステーションを単一のファイルに保存します。RoboDKでは、ファイル(rdk形式)をダブルクリックしてプロジェクトを再開できます。