はじめに#
ISO規格「ISO9283:産業用ロボットの操作-パフォーマンス基準と関連するテスト方法」では、産業用ロボットのパフォーマンスを評価するためのテストについて説明しています。特に、ロボットの位置精度、再現性、経路精度を適切に測定する手順を提供します。
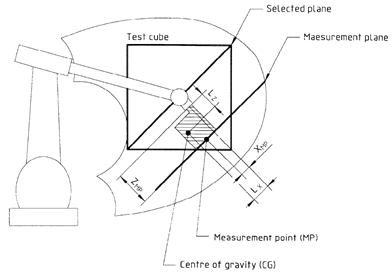
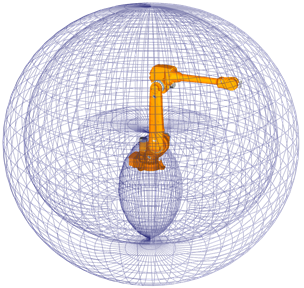
ISO9283規格によれば、すべてのテストは、いわゆるISOテストキューブ内で実行する必要があります。ISOテストキューブは、ロボットのワークスペース内に収まる最大のキューブであると想定されています。さらに、位置精度と再現性は、5つの異なる構成で30回測定する必要があります。最近のロボットの精度を適切に測定するには、5つの構成では不十分であることはよく知られています。
ほとんどのロボットメーカーは、ロボットがキャリブレーションされている場合にのみロボットの位置精度を提供します。さらに、少なくとも100の異なる構成を使用して適切な位置精度統計を提供します。産業用ロボットは再現性は高いですが正確ではありません。したがって、産業用ロボットの精度は、校正によって改善できます。
80年代の典型的なロボットワークスペース 典型的なロボットのワークスペース 現代のロボットの
ただし、ISO9283規格は、ロボットがキャリブレーションされていない場合でも、再現性と経路精度のテストによく使用されます。

RoboDKを使用したパス精度テストを示す次のビデオを視聴することをお勧めします。 https://youtu.be/yMQjqAQY1iE。
RoboDKは、ロボットのキャリブレーションや、キャリブレーション前後のロボットのパフォーマンスのテストにも使用できます。最後に、RoboDKを使用して、ボールバーテストによるキャリブレーションの前後にロボットの精度をテストすることもできます。