オフライン設定#
RoboDKで実際のセットアップ(オフラインセットアップ)の仮想環境を構築して、テスト用のパスと位置を準備することをお勧めします。これは、RoboDKがインストールされているコンピューターを使用する場合にのみ、ロボットとトラッカーを使用する前に実行できます。RoboDKキャリブレーションとパス検証のセットアップ例は、次のフォルダーからダウンロードできます。
https://www.robodk.com/downloads/calibration/
RoboDKには、ISO9283標準で規定されている構成と推奨パスを生成するユーティリティがあります。このユーティリティを使用するには:
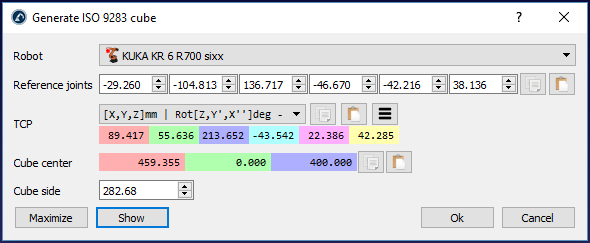
1.ユーティリティ➔ISO 9283キューブを作成する(ターゲットとパス)
2.参照ジョイントを入力します(ツールがトラッカーに面するロボットの位置)
3.立方体の位置とサイズを調整する
4.[OK]を選択します
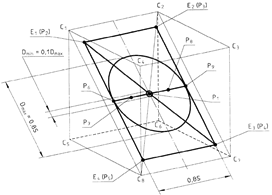
これにより、ISO標準で記述された5つのターゲットと、パスの精度テストに推奨されるパスが作成されます。これらのターゲットとパスは、ロボットの前にある立方体の中に残ります。パスの方向を定義する中心(ターゲット“ ISO p1”)と参照ジョイントを移動するだけでなく、目的の立方体の側を設定できます。キューブのサイズを最大化して、ロボットのワークスペースに収まる最大のキューブを見つけることもできます。
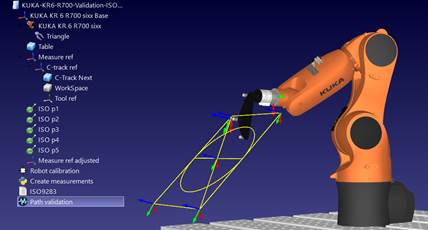
ロボットのキャリブレーションとロボットの検証オプションを備えたサンプルステーションを次の図に示します。