パス精度#
パス精度テストを実行するには、RoboDKで作成されたロボットプログラム(ISOキューブの作成ユーティリティで作成されたISO9283プログラムなど)が必要です。プログラムを選択してF6キーを押す(またはプログラムを選択する)ことで、ベンダー固有のロボットプログラムを生成できます。➔プログラムを生成する)。または、RoboDKで作成された他のプログラム(直線、円、正方形など)を使用することもできます。
また、エンドエフェクターの位置を追跡し、参照フレームに対する位置測定値を提供できる測定システムが必要です。ロボットのベースフレームとツールフレームを識別するには、RoboDKのベースセットアップおよびツールセットアップ手順(キャリブレーションまたは位置精度テストの実行に必要)を使用する必要があります。
プログラムに沿ってロボットを動かしながら、測定データを取得する必要があります。測定は、測定システムのメーカーが提供するデフォルトのソフトウェアを使用して、継続的に記録する必要があります。測定値をCSVまたはTXTファイルとしてエクスポートする必要があります。これらのファイルには、XYZ位置データと各測定のタイムスタンプが含まれている必要があります。オプションで、これらの測定値には、ロボットベースに対するツールの向きを含めることができます。
注意:できるだけ高速で、フィルタリングを行わずに測定することをお勧めします。
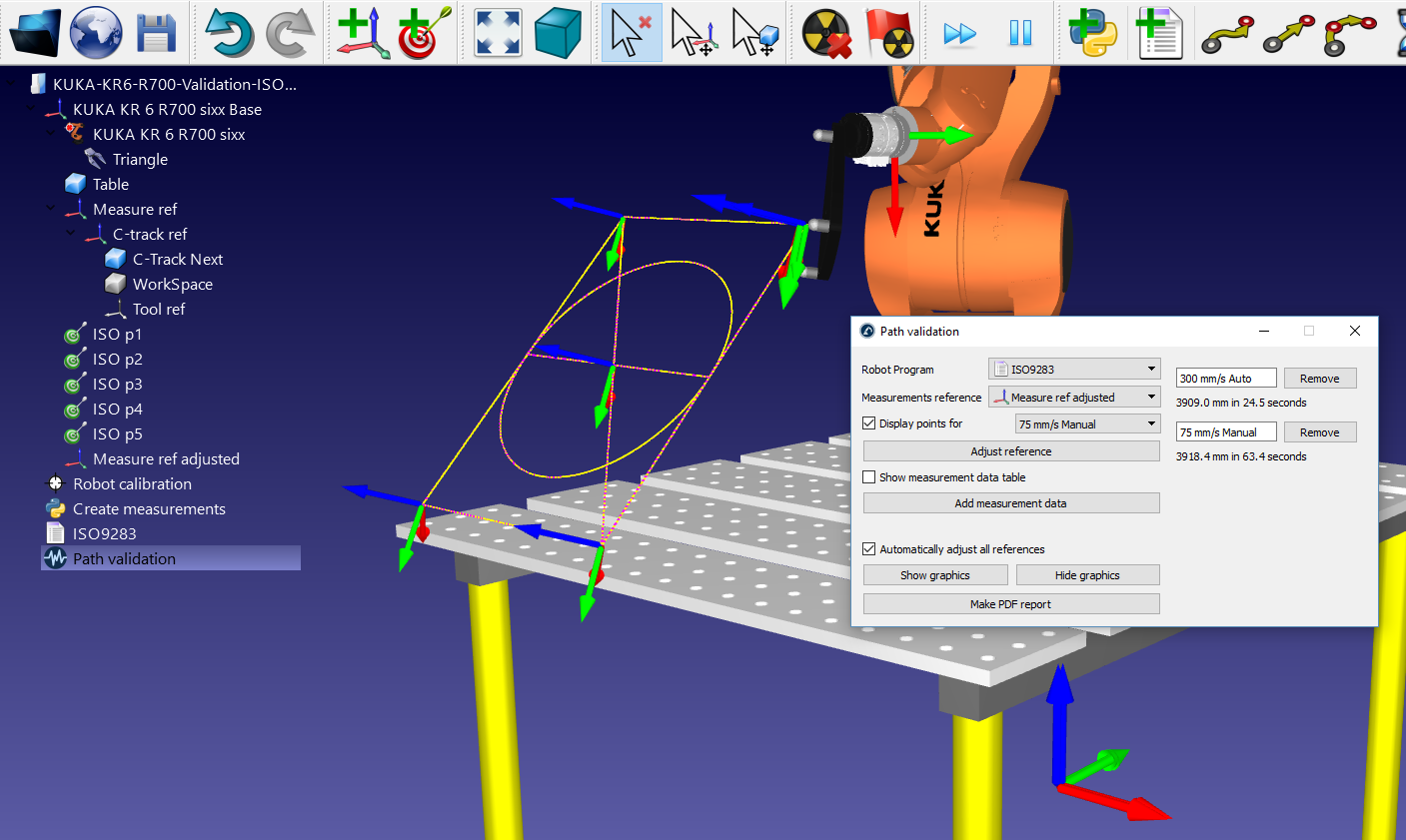
RoboDKでパス検証プロジェクトを開始するには:
1.ユーティリティを選択➔テストパスの精度、速度、加速度(ISO 9283)
2.ドロップダウンメニューから検証に使用するプログラムを選択します
3.測定に使用される参照フレームを提供する
4.「測定データの追加」を選択して、測定データをインポートします。または、測定値を含むCSVまたはTXTファイルをパス検証ウィンドウにドラッグアンドドロップすることもできます。
最後に、[PDFレポートを作成]を選択して、パスの精度、速度、加速度に関する統計とグラフィックを含むPDFを生成します。同じレポートを異なる条件(異なる速度、異なる丸め/コーナー値、異なるペイロードなど)で複数回実行して、同じレポートでこれらのパラメーターを比較することができます。
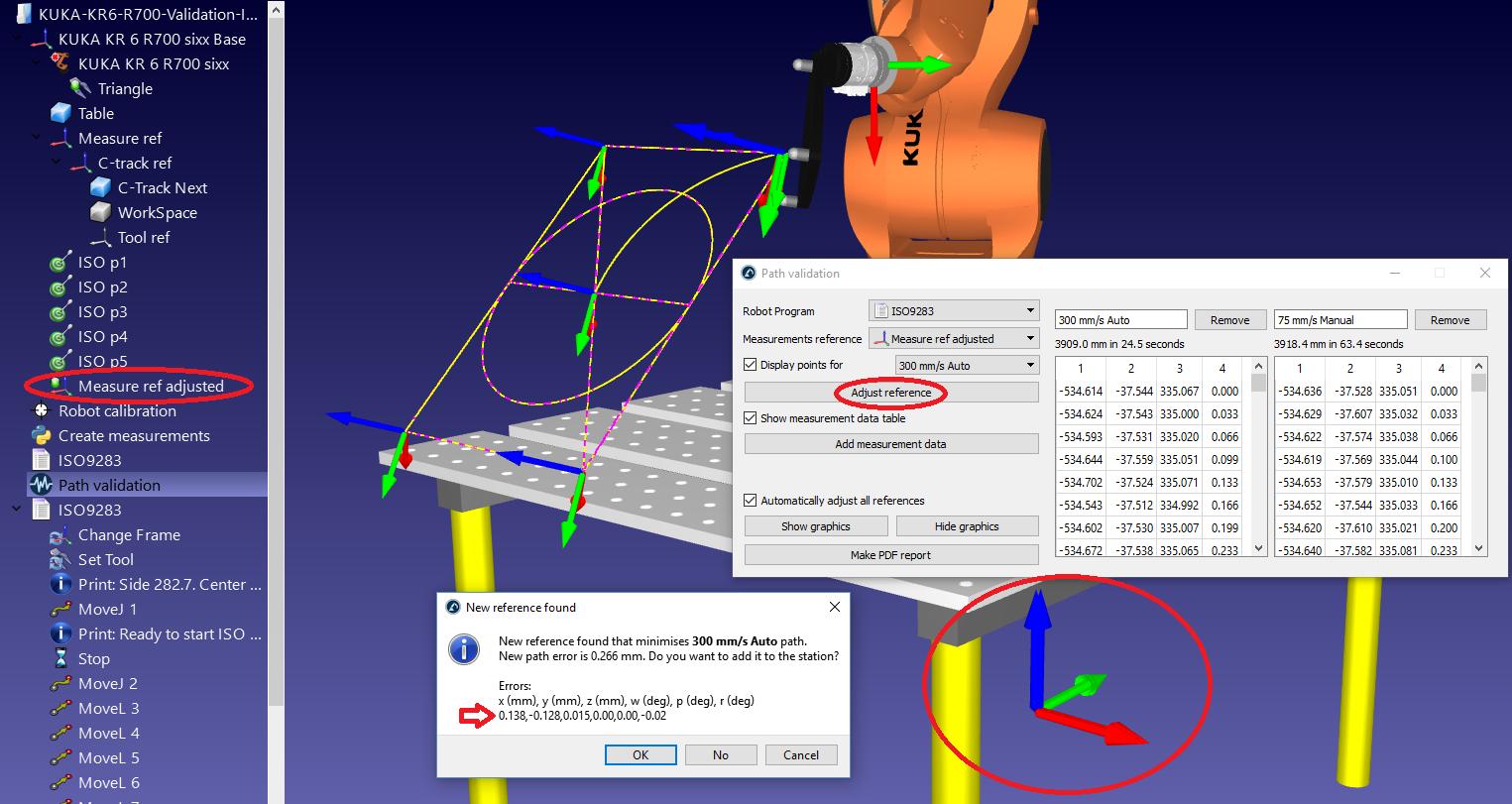
測定点は紫色で表示できます。これらの測定値は、ロボットが辿らなければならない理想的な経路を表す黄色の経路と一致する必要があります。RoboDKが提供する統計は、これら2つのパスの違いです。
参照フレームが適切に定義されていなかった場合、測定ポイントは黄色のパスと一致しません。これは、不適切な参照フレーム定義や別のツール定義など、いくつかの理由で発生する可能性があります。この場合、[参照の調整]を選択すると、2つのパスが最もよくフィットするようになり、提供される統計によってこれらの不整合が分離されます。