結果#
パス精度テストが完了すると、パス検証ウィンドウから[PDFレポートの作成]を選択してPDFレポートを取得できます。これにより、パスの精度、速度、加速度に関する統計とグラフィックを含むPDFが生成されます。
前のセクションで準備したサンプルテストの結果を次の図に示します。この例では、ISO9283プログラムは2つの異なるモードで実行されています。
●75 mm / s速度の手動モード
●300 mm / s速度の自動モード
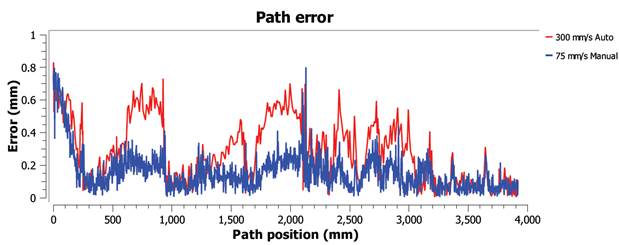
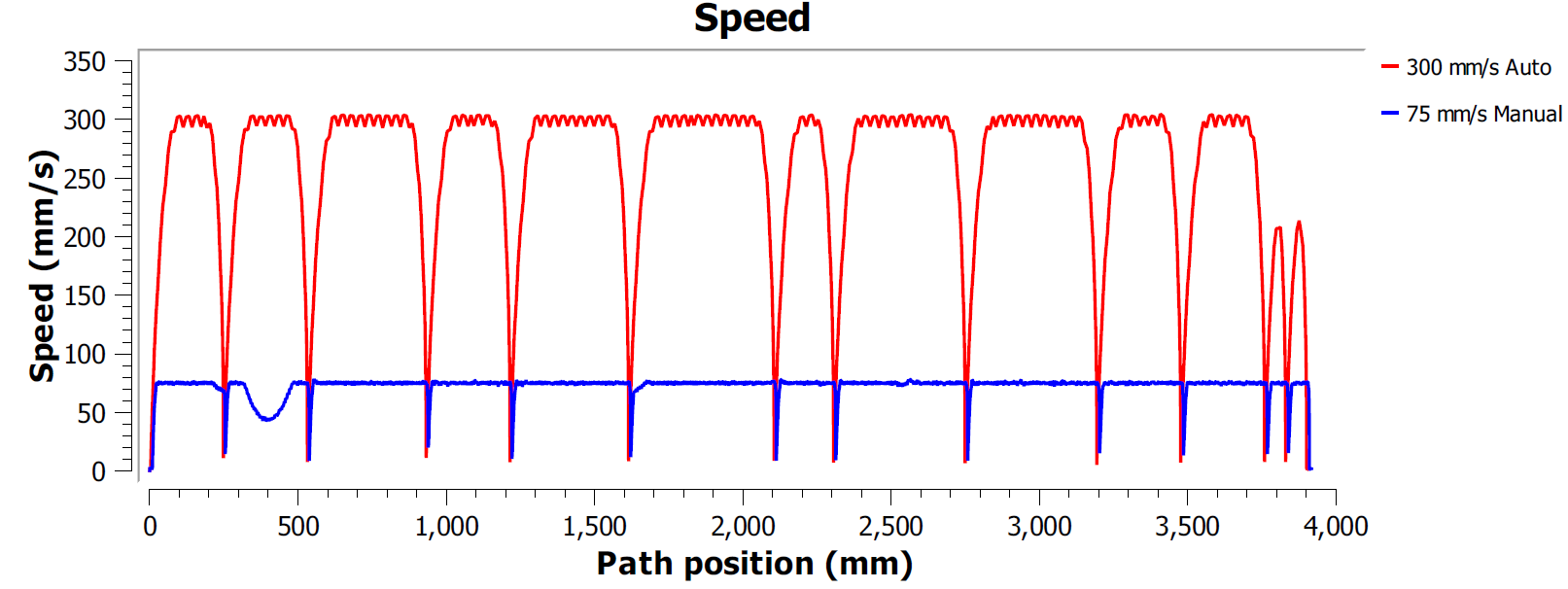
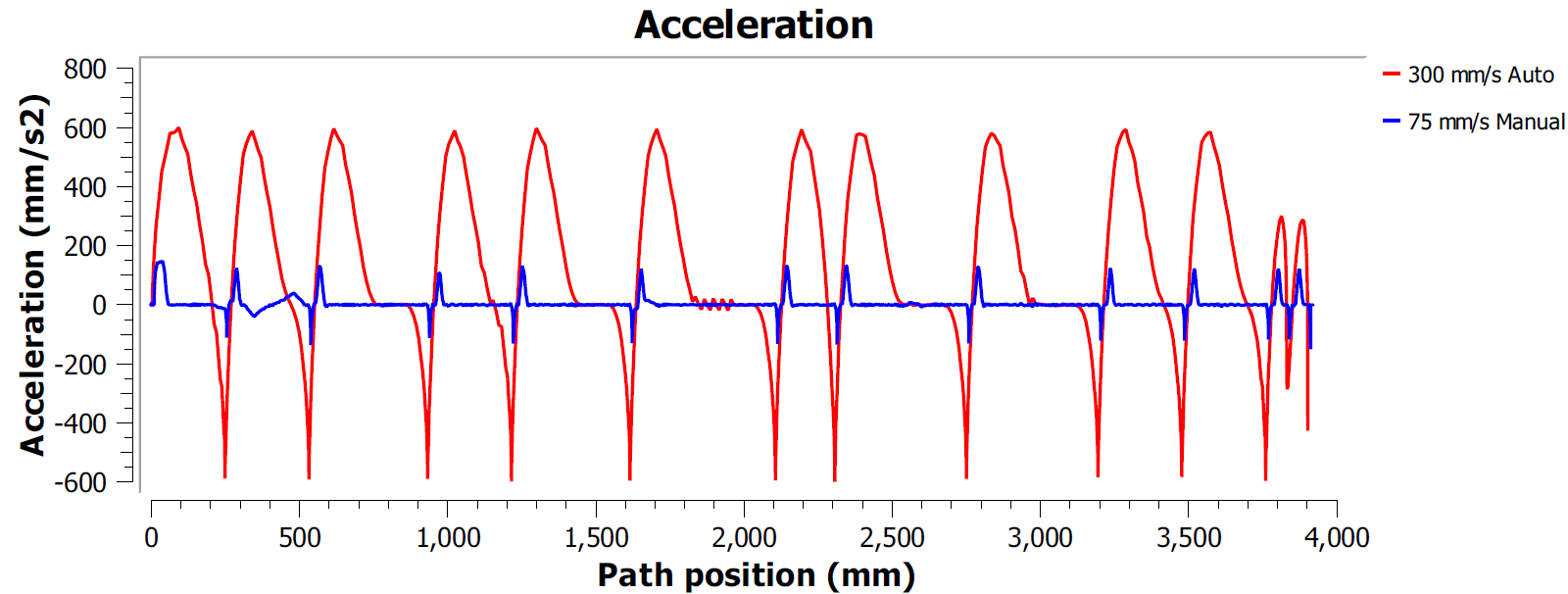
この例では、どちらのプログラムも、[精度の精度]オプションを使用して生成されています。つまり、ロボットはすべてのポイントで停止し、パスをできるだけ正確にします。この場合、速度はすべての線または円の動き(コーナー)の終わりでゼロでなければならないため、パスに沿って高い加速と減速を観察するのが一般的です。
ほとんどのロボットブランドは、エッジを滑らかにすることでこの影響を回避するための丸めオプションを提供しています。たとえば、ABBはそれをZoneDataと呼び、コントローラーがエッジを平滑化できる精度のゾーンを指定できます。FanucはそれをCNTと呼び、速度に比例した平滑化のパーセンテージを指定できます。KUKAオプションはC_DISで$ ADVANCE命令を提供しますフラグとUniversal Robotsでは、ブレンド半径を指定してエッジを滑らかにすることができます)。
したがって、パス精度テストでは、パスのエッジに近い許容可能な精度レベルを維持しながらスムーズな速度を維持することの間の適切な妥協点を見つけることができます。
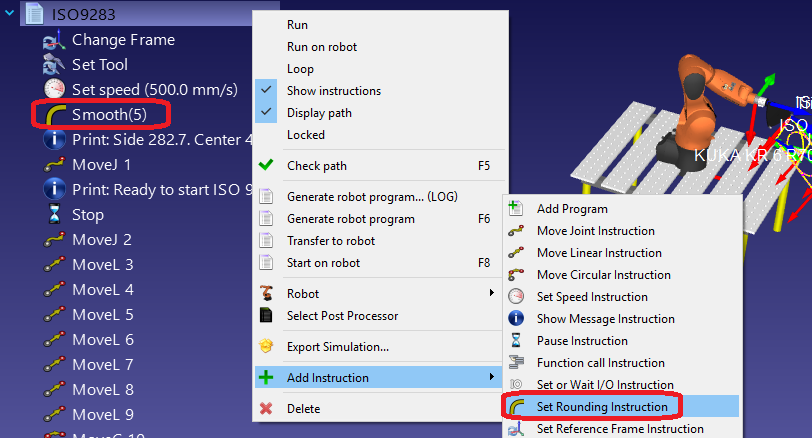
RoboDKの丸めパラメータとプログラム速度を指定できます。このようなテスト用のプログラムを編集するには:
1.プログラムを右クリック
2.[手順を表示]を選択します
3.最初または2番目の命令を選択します
4.プログラムを選択➔丸め指示の設定丸め精度を指定する
5.プログラムを選択➔速度指示の設定 速度を指定する