ISO9283 Performance Testing
はじめに#ISO9283テスト
ISO規格「ISO9283:産業用ロボットの操作-パフォーマンス基準と関連するテスト方法」では、産業用ロボットのパフォーマンスを評価するためのテストについて説明しています。特に、ロボットの位置精度、再現性、経路精度を適切に測定する手順を提供します。
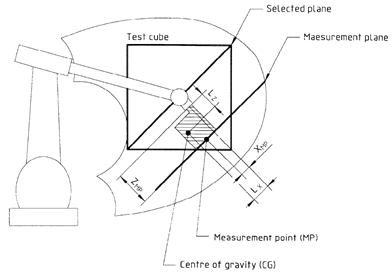
ISO9283規格によれば、すべてのテストは、いわゆるISOテストキューブ内で実行する必要があります。ISOテストキューブは、ロボットのワークスペース内に収まる最大のキューブであると想定されています。さらに、位置精度と再現性は、5つの異なる構成で30回測定する必要があります。最近のロボットの精度を適切に測定するには、5つの構成では不十分であることはよく知られています。
ほとんどのロボットメーカーは、ロボットがキャリブレーションされている場合にのみロボットの位置精度を提供します。さらに、少なくとも100の異なる構成を使用して適切な位置精度統計を提供します。産業用ロボットは再現性は高いですが正確ではありません。したがって、産業用ロボットの精度は、校正によって改善できます。
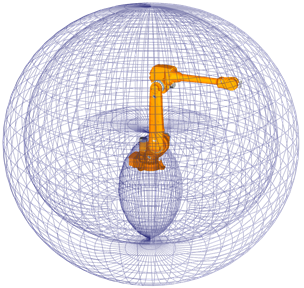
80年代の典型的なロボットワークスペース 典型的なロボットのワークスペース 現代のロボットの
ただし、ISO9283規格は、ロボットがキャリブレーションされていない場合でも、再現性と経路精度のテストによく使用されます。

RoboDKを使用したパス精度テストを示す次のビデオを視聴することをお勧めします。 https://youtu.be/yMQjqAQY1iE。
RoboDKは、ロボットのキャリブレーションや、キャリブレーション前後のロボットのパフォーマンスのテストにも使用できます。最後に、RoboDKを使用して、ボールバーテストによるキャリブレーションの前後にロボットの精度をテストすることもできます。
要件#ISO9283-要件
RoboDKをインストールしてロボットパス精度テストを適切に実行するには、次のアイテムが必要です。
1.1つ以上の産業用ロボットアーム
2.測定システム:Leica、API、Faroなどのレーザートラッカー、またはCreaformのC-Trackステレオカメラなどの光学CMM
3.RoboDKソフトウェアをインストールする必要があり、ISO9283テスト用の適切なライセンスが必要です。ネットワークライセンスの場合、ライセンスを確認するにはインターネット接続が必要です。ISO9283パフォーマンステスト用にRoboDKをインストールまたは更新するには:
a.ダウンロードセクションからRoboDKをダウンロード
https://robodk.com/download
b.測定システムのドライバーをセットアップします(Creaform Optical CMMには必要ありません)。
適切なフォルダを解凍してコピーします。
APIレーザートラッカー:https://robodk.com/downloads/private/API.zip(OTIIおよびラジアントラッカー)
ファロレーザートラッカー:https://robodk.com/downloads/private/Faro.zip(すべてのFaroトラッカー)
ライカレーザートラッカー:https://robodk.com/downloads/private/Leica.zip(すべてのライカトラッカー)
フォルダ:C:/ RoboDK / api /
オフライン設定#ISO9283-オフライン
RoboDKで実際のセットアップ(オフラインセットアップ)の仮想環境を構築して、テスト用のパスと位置を準備することをお勧めします。これは、RoboDKがインストールされているコンピューターを使用する場合にのみ、ロボットとトラッカーを使用する前に実行できます。RoboDKキャリブレーションとパス検証のセットアップ例は、次のフォルダーからダウンロードできます。
https://www.robodk.com/downloads/calibration/
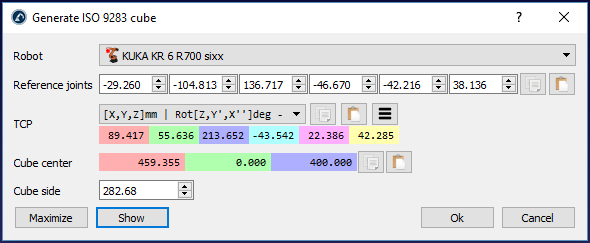
RoboDKには、ISO9283標準で規定されている構成と推奨パスを生成するユーティリティがあります。このユーティリティを使用するには:
1.ユーティリティ➔ISO 9283キューブを作成する(ターゲットとパス)
2.参照ジョイントを入力します(ツールがトラッカーに面するロボットの位置)
3.立方体の位置とサイズを調整する
4.[OK]を選択します
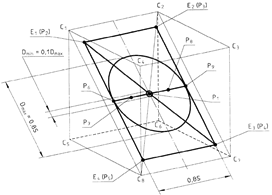
これにより、ISO標準で記述された5つのターゲットと、パスの精度テストに推奨されるパスが作成されます。これらのターゲットとパスは、ロボットの前にある立方体の中に残ります。パスの方向を定義する中心(ターゲット“ ISO p1”)と参照ジョイントを移動するだけでなく、目的の立方体の側を設定できます。キューブのサイズを最大化して、ロボットのワークスペースに収まる最大のキューブを見つけることもできます。
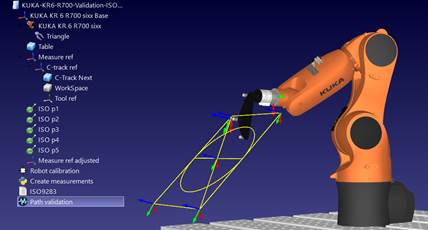
ロボットのキャリブレーションとロボットの検証オプションを備えたサンプルステーションを次の図に示します。
位置精度と再現性#ISO9283-Pos
ロボットのキャリブレーション中に位置精度の検証に使用されるのと同じ手順を位置精度テストにも使用できます。同じグループのポイントで連続して測定を行うと、再現性の統計情報も取得できます。検証またはキャリブレーションのみを実行する場合と検証を実行する場合の唯一の違いは、最初のオプションではロボットのキャリブレーションライセンスが不要であることです。
このような検証を実行するには、メニューを選択する必要があります。
●ユーティリティ➔テスト位置の精度と再現性(ISO 9283)
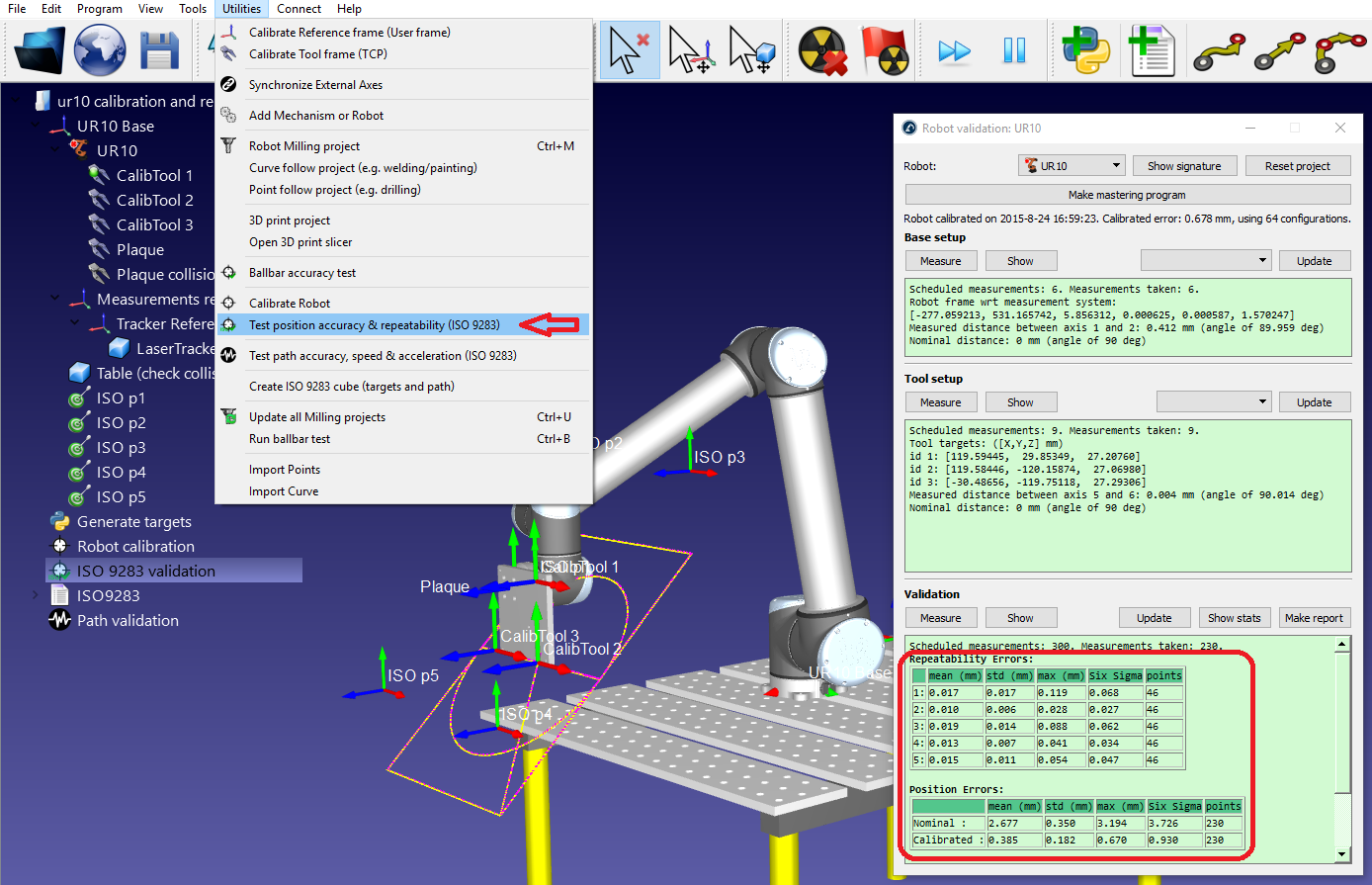
これらのテストでは、測定基準フレーム(ベース設定)に関してロボットのベースフレームを特定し、ロボットフランジ(ツール設定)に関してツールフレームを特定する必要があります。
位置精度と再現性のテストが完了すると、PDFレポートを取得できます。
パス精度#ISO9283-パス
パス精度テストを実行するには、RoboDKで作成されたロボットプログラム(ISOキューブの作成ユーティリティで作成されたISO9283プログラムなど)が必要です。プログラムを選択してF6キーを押す(またはプログラムを選択する)ことで、ベンダー固有のロボットプログラムを生成できます。➔プログラムを生成する)。または、RoboDKで作成された他のプログラム(直線、円、正方形など)を使用することもできます。
また、エンドエフェクターの位置を追跡し、参照フレームに対する位置測定値を提供できる測定システムが必要です。ロボットのベースフレームとツールフレームを識別するには、RoboDKのベースセットアップおよびツールセットアップ手順(キャリブレーションまたは位置精度テストの実行に必要)を使用する必要があります。
プログラムに沿ってロボットを動かしながら、測定データを取得する必要があります。測定は、測定システムのメーカーが提供するデフォルトのソフトウェアを使用して、継続的に記録する必要があります。測定値をCSVまたはTXTファイルとしてエクスポートする必要があります。これらのファイルには、XYZ位置データと各測定のタイムスタンプが含まれている必要があります。オプションで、これらの測定値には、ロボットベースに対するツールの向きを含めることができます。
注意:できるだけ高速で、フィルタリングを行わずに測定することをお勧めします。
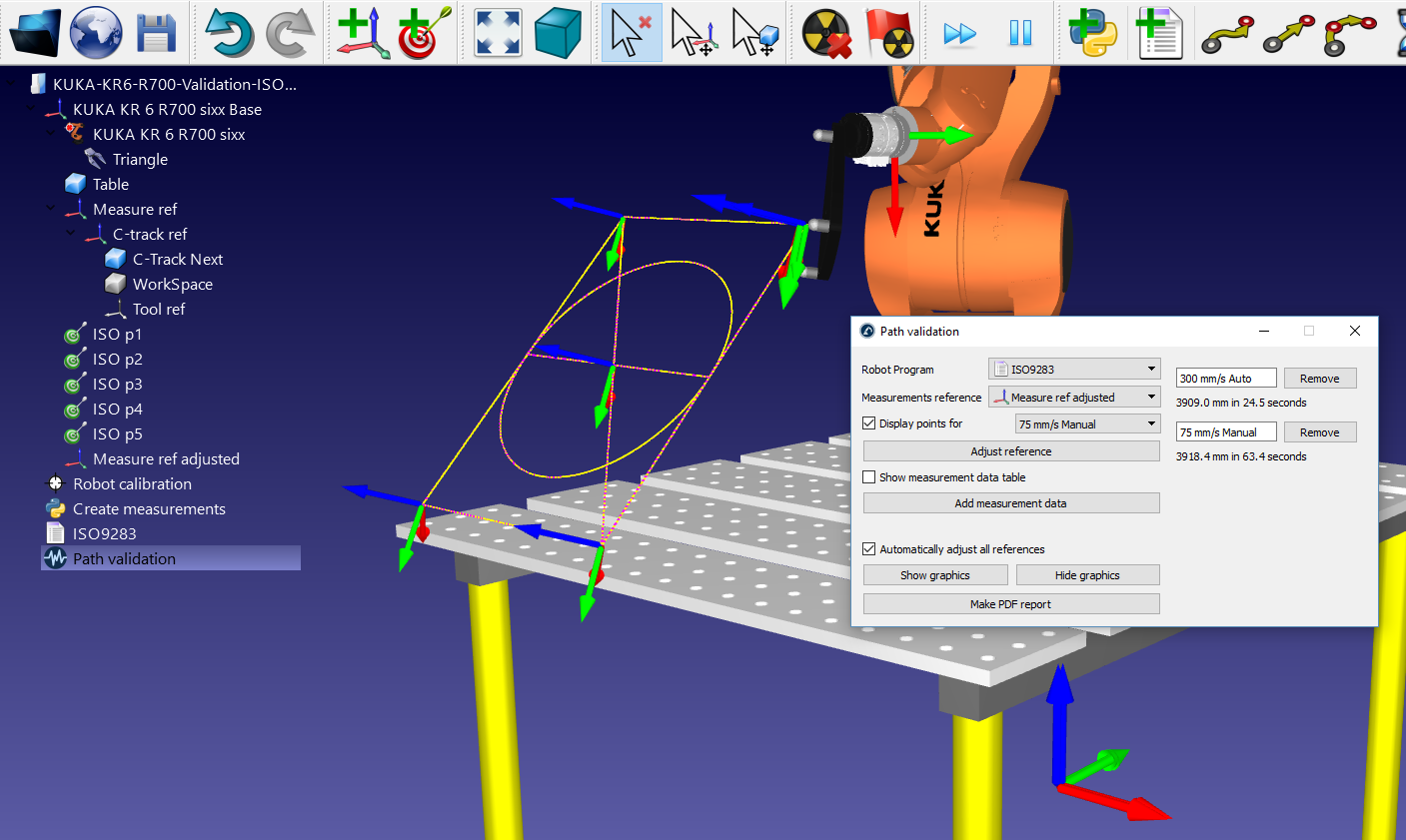
RoboDKでパス検証プロジェクトを開始するには:
1.ユーティリティを選択➔テストパスの精度、速度、加速度(ISO 9283)
2.ドロップダウンメニューから検証に使用するプログラムを選択します
3.測定に使用される参照フレームを提供する
4.「測定データの追加」を選択して、測定データをインポートします。または、測定値を含むCSVまたはTXTファイルをパス検証ウィンドウにドラッグアンドドロップすることもできます。
最後に、[PDFレポートを作成]を選択して、パスの精度、速度、加速度に関する統計とグラフィックを含むPDFを生成します。同じレポートを異なる条件(異なる速度、異なる丸め/コーナー値、異なるペイロードなど)で複数回実行して、同じレポートでこれらのパラメーターを比較することができます。
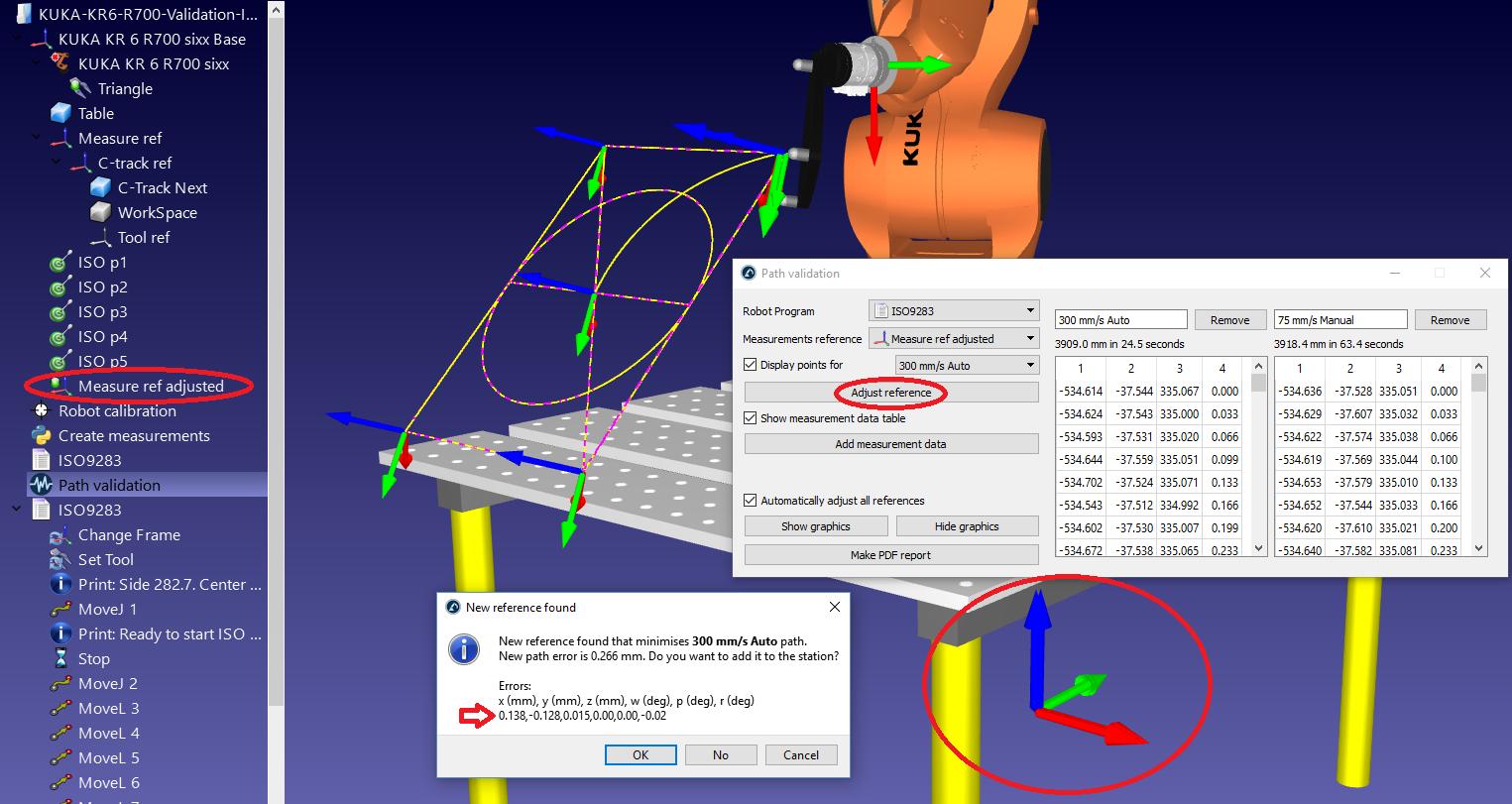
測定点は紫色で表示できます。これらの測定値は、ロボットが辿らなければならない理想的な経路を表す黄色の経路と一致する必要があります。RoboDKが提供する統計は、これら2つのパスの違いです。
参照フレームが適切に定義されていなかった場合、測定ポイントは黄色のパスと一致しません。これは、不適切な参照フレーム定義や別のツール定義など、いくつかの理由で発生する可能性があります。この場合、[参照の調整]を選択すると、2つのパスが最もよくフィットするようになり、提供される統計によってこれらの不整合が分離されます。
結果#ISO9283-結果
パス精度テストが完了すると、パス検証ウィンドウから[PDFレポートの作成]を選択してPDFレポートを取得できます。これにより、パスの精度、速度、加速度に関する統計とグラフィックを含むPDFが生成されます。
前のセクションで準備したサンプルテストの結果を次の図に示します。この例では、ISO9283プログラムは2つの異なるモードで実行されています。
●75 mm / s速度の手動モード
●300 mm / s速度の自動モード
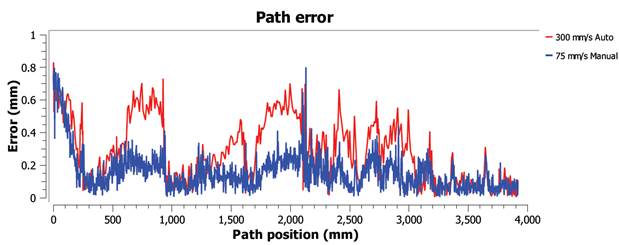
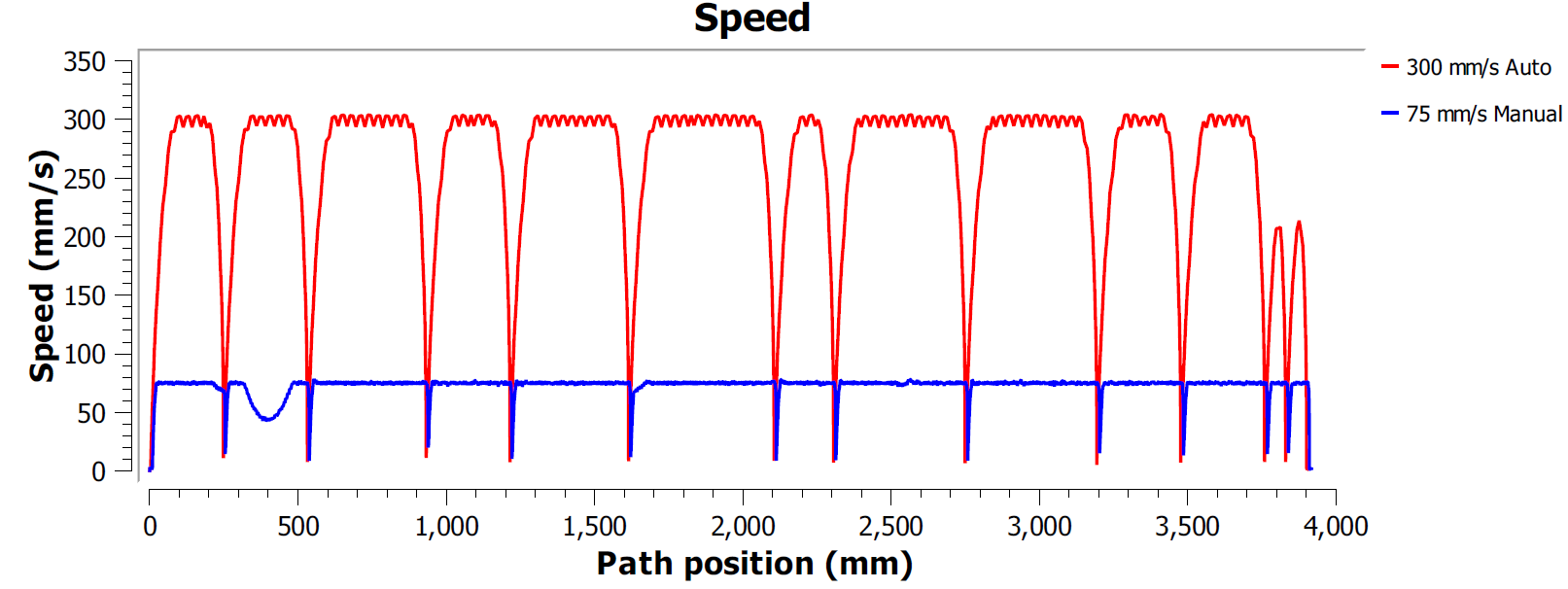
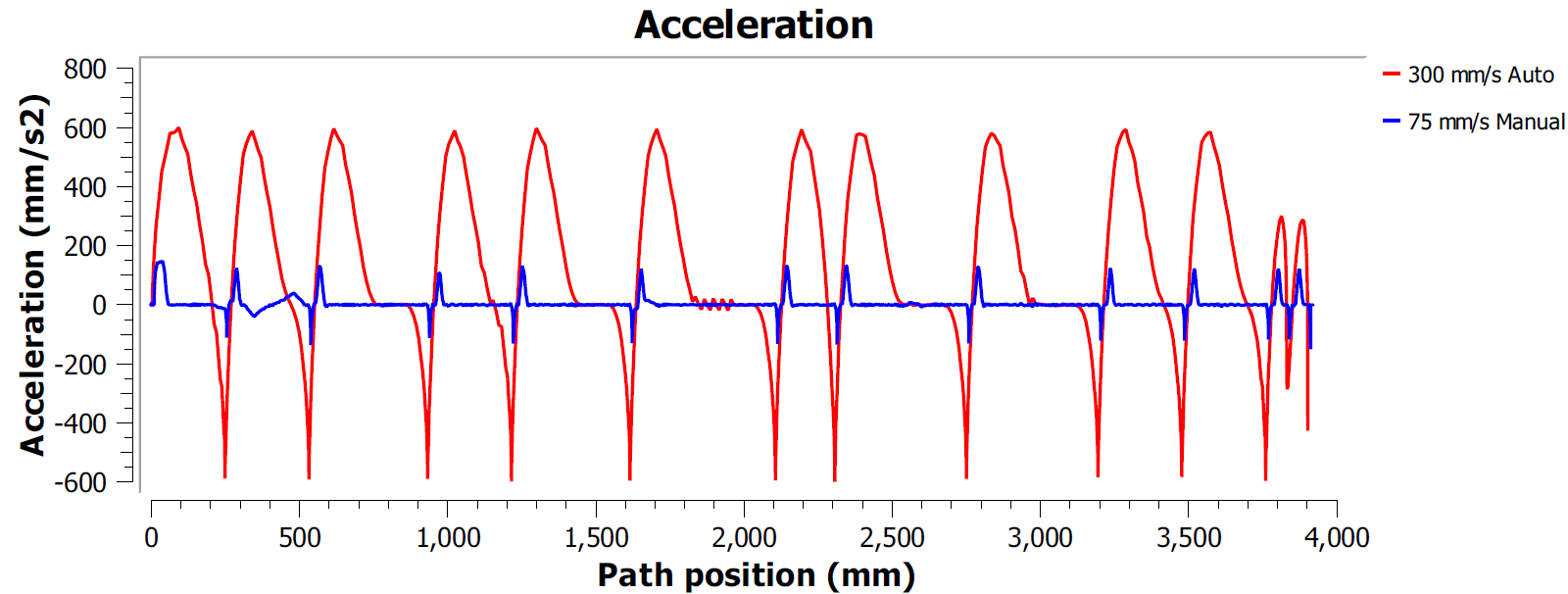
この例では、どちらのプログラムも、[精度の精度]オプションを使用して生成されています。つまり、ロボットはすべてのポイントで停止し、パスをできるだけ正確にします。この場合、速度はすべての線または円の動き(コーナー)の終わりでゼロでなければならないため、パスに沿って高い加速と減速を観察するのが一般的です。
ほとんどのロボットブランドは、エッジを滑らかにすることでこの影響を回避するための丸めオプションを提供しています。たとえば、ABBはそれをZoneDataと呼び、コントローラーがエッジを平滑化できる精度のゾーンを指定できます。FanucはそれをCNTと呼び、速度に比例した平滑化のパーセンテージを指定できます。KUKAオプションはC_DISで$ ADVANCE命令を提供しますフラグとUniversal Robotsでは、ブレンド半径を指定してエッジを滑らかにすることができます)。
したがって、パス精度テストでは、パスのエッジに近い許容可能な精度レベルを維持しながらスムーズな速度を維持することの間の適切な妥協点を見つけることができます。
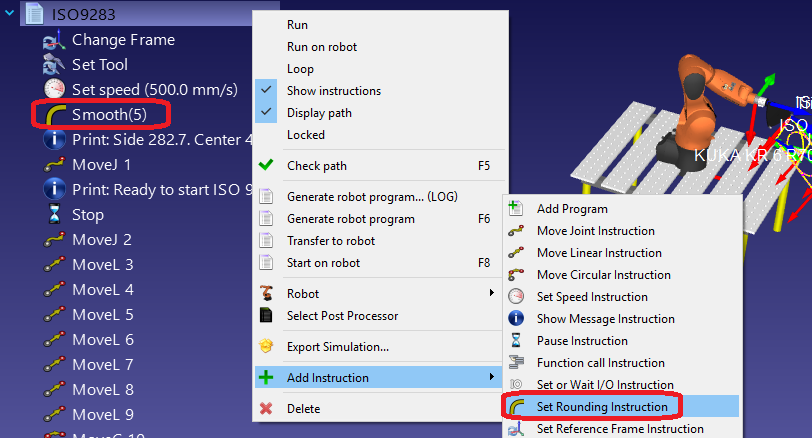
RoboDKの丸めパラメータとプログラム速度を指定できます。このようなテスト用のプログラムを編集するには:
1.プログラムを右クリック
2.[手順を表示]を選択します
3.最初または2番目の命令を選択します
4.プログラムを選択➔丸め指示の設定丸め精度を指定する
5.プログラムを選択➔速度指示の設定 速度を指定する