ABBロボット
RoboDKは、PRGおよびMODファイル(IRC5、S4、S4Cロボットコントローラー)を含む、RAPID言語でプログラムされた全てのABBロボットをサポートします。このドキュメンテーションは、IRC5 のABBロボットコントローラーに基づいています。
RoboDKは、選択したポストプロセッサーに応じて、大規模なプログラムを自動的に自動ロボットプログラム分割で処理します。
続く項目では、ABBロボットティーチペンダントを使用して、一般的な操作を示します。例えば、RoboDKで新しいロボットプログラムを準備し、ロボットに転送させたり。
ロボットプログラムの転送
以下の手順を辿って、プログラムモジュール(MODファイル)をUSBドライブからABB IRC5ロボットコントローラへ読み込みます。
1.ABB ➔プログラムエディターを選択
2.画面上部にあるモジュールを選択してくださ
3.ファイル➔モジュールを読み込むを選択(新しいプロジェクトを開始する場合、プログラムポインター/PPが失われることは重要ではありません)
4.USBディスクからMODファイルを選択します
5.OKを選択
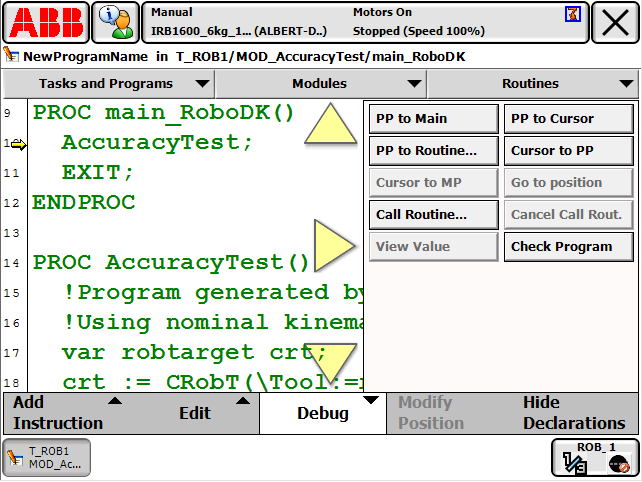
ロボットプログラムの開始
ABB IRC5ロボットコントローラーで特定のロボットプログラムを開始するには、次の手順を辿ります。
1.コントローラのスイッチを手動(Manual)モードに変更します。上部のメニューバーに手動モードであるメッセージが表示されます。
2.次を選択:ABB➔プログラムエディター(Program editor)➔デバッグ(Debug)➔PP to routine
3.RoboDKによって生成されたプログラムを選択。使用するポストプロセッサーによっては、メインルーチンが既にモジュールにある場合があります。
4.手動モードで操作している場合、ティーチペンダントの「デッドマン」スイッチを押し続けます。ロボットのステータスとしてモーターオン(Motors On)というメッセージが表示され、同時にオレンジ色のロボットライトが点灯するはずです。
5.ティーチペンダントの再生ボタンを選択してプログラムを開始します
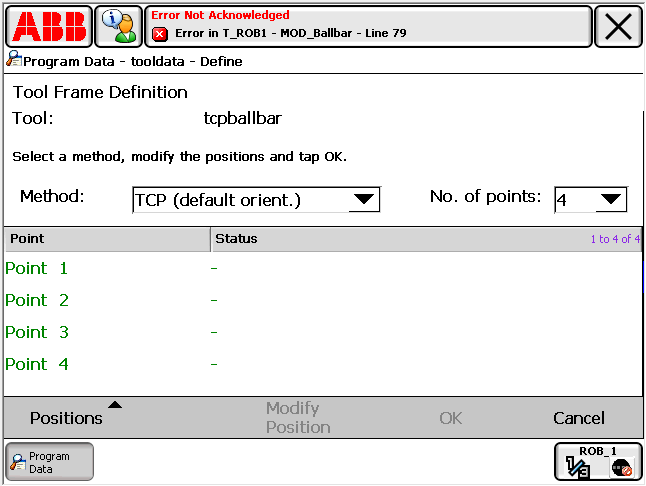
TCPの取得#TCP-ABB
次の手順は、ロボットツール(TCP、またはtooldataとも呼ばれます)の作成または変更を可能にします。
1.ABB ➔プログラムデータ➔ツールデータ(ダブルクリック)を選択
2.既存のツール変数を作成または変更することが可能です
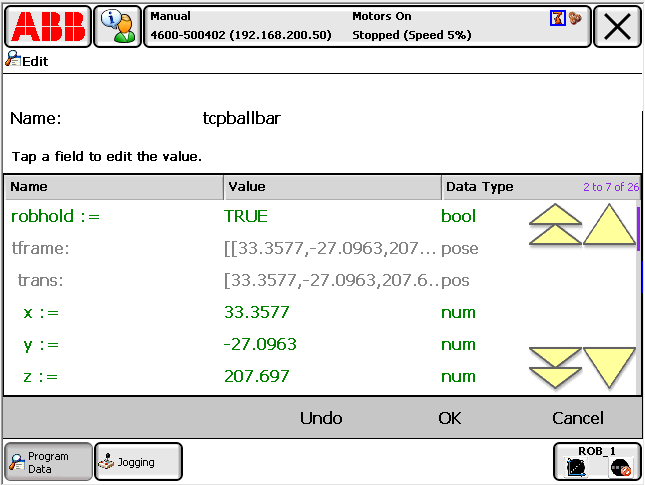
3.ツールが定義された後、TCPのX、Y、Z値は取得できます
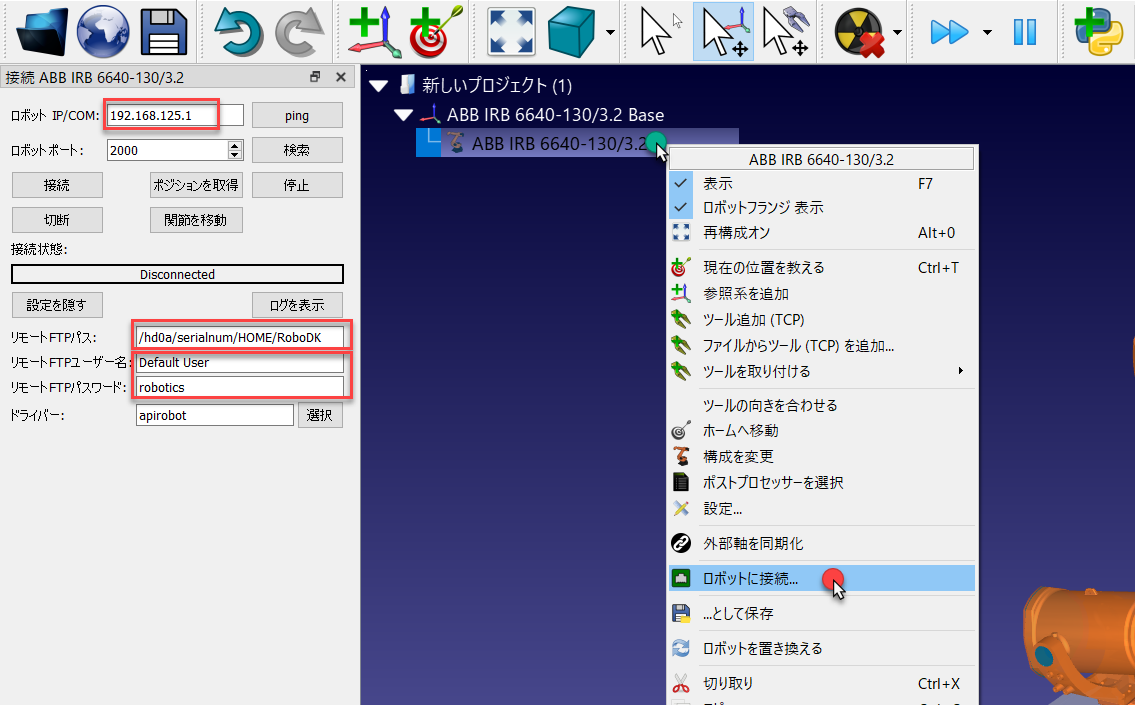
FTP経由でプログラムの転送#FTP-ABB
プログラムは、RoboDKからABBロボットへFTPを介して簡単に転送できます:
1.RoboDKのロボットを右クリックします
2.ロボットに接続…を選択
3.ロボットのIPを入力してください
4.リモートFTPパスを入力します。
完全なパスは、ティーチペンダントまたはFileZilla FTPクライアントを使用して取得できます。
5.FTP資格情報を入力します(デフォルトで匿名)。
RoboDKのプログラムをロボットに送信する準備ができたら:
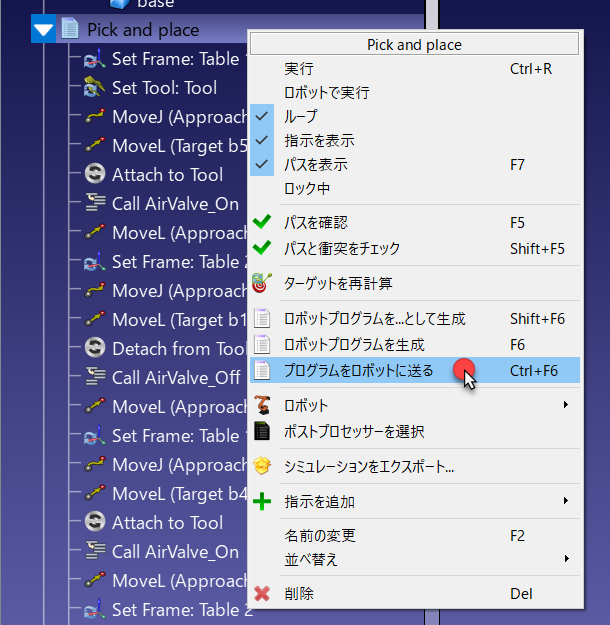
1.RoboDKでプログラムを右クリック
2.プログラムをロボットに送信(Ctrl+F6)を選択します
これによりプログラムが生成され、ロボットコントローラへの転送が試行されます。FTP転送が成功したかどうかを表示するウィンドウがポップアップします。
プログラムをその場でFTP経由で転送される場合、ロボット側はRAPIDプログラミングを使用してプログラムを読み込む必要があります。次の例では、MOD_Pick_and_placeというモジュールからmain_RoboDKプログラムを実行します:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program: " + path_module;
! call the main program from the module sent and loaded
! %"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog"+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
ABB用のRoboDKドライバー
ロボットドライバーは、オフラインプログラミングの代替手段を可能にします。ロボットドライバーを使って直接ロボットにシミュレーションが実行できます(オンラインプログラミング)。詳細については、ロボットドライバー項目へ。
RoboDKとABBロボットの間に接続を成立させて、接続されたPCからボットを自動的に動かせます。これにより、オンラインプログラミングとデバッグ用にRoboDKのロボットで実行機能が使用できます。接続は、イーサネット接続(TCP / IP)またはシリアル接続(RS232)を介して成立できます。
以下の手順を辿って、ABBロボット用のRoboDKドライバーを設置します:
1.イーサネットケーブル(またはシリアル接続を使用する場合はRS232接続)を使用して、コンピューターをロボットに接続します。
2.RDK_DriverSocket.modモジュールをロボットに読み込みます(USBドライブ、FTP転送、またはRobotStudioを使用して)。これはメインタスクとして使用する必要があり、このモジュールには既にメインプログラムコールが含まれています。
RS232接続を使用する場合は、代わりにRDK_DriverSerial.modモジュールを使用します。
ABBのティーチペンダントで次の手順で、ティーチペンダントからプログラムを読み込みます:
a.ABB ➔プログラムエディターを選択
b.タスクとプログラムを選択します(画面上部)
c.モジュールを表示を選択します(画面下部)。
d.ファイル➔モジュールを読み込む…を選択 (YESを選択して、プログラムポインターが失われます)
e.modファイルを選択し、OKを選択します。
3.メインプログラムを実行します(メインプログラムはRoboDK_Driver.modにあります)。
CONST string SERVER_IP := "192.168.125.1";
提供されたプログラムのデフォルトの通信ポートは2000ですが、変更することもできます。