スピードと加速
Brooks PreciseFlexロボットの最大直線速度、最大角速度、最大関節速度/加速度に関する情報は、Web Interfaceにアクセスして以下の手順で確認できます:
1.管理者
2.セットアップ - パラメータデータベース
3.ロボット
4.ジョイント/カルテジアン制御
5.動的パラメータ
6.データID 2700、2701、2702、2703
ユーザーは上記のDataIDの値を参照としてRoboDKの速度/加速度命令の入力を設定することができます。Preciseポストプロセッサはこれらの値を使用して、GPLプロファイルクラスが要求する各ロボットの最大速度/加速度に対するパーセンテージとして速度/加速度を計算します。
ポストプロセッサが使用するリミットを変更するには、使用している特定のロボットに応じてポストプロセッサを変更します。デフォルトでは、ポストプロセッサは PF400 と PF3400 ロボットのリミットを使用します。ポストプロセッサを変更するには、マニュアルの https://robodk.com/doc/en/Post-Processors.html#PPEditor セクションを参照してください。
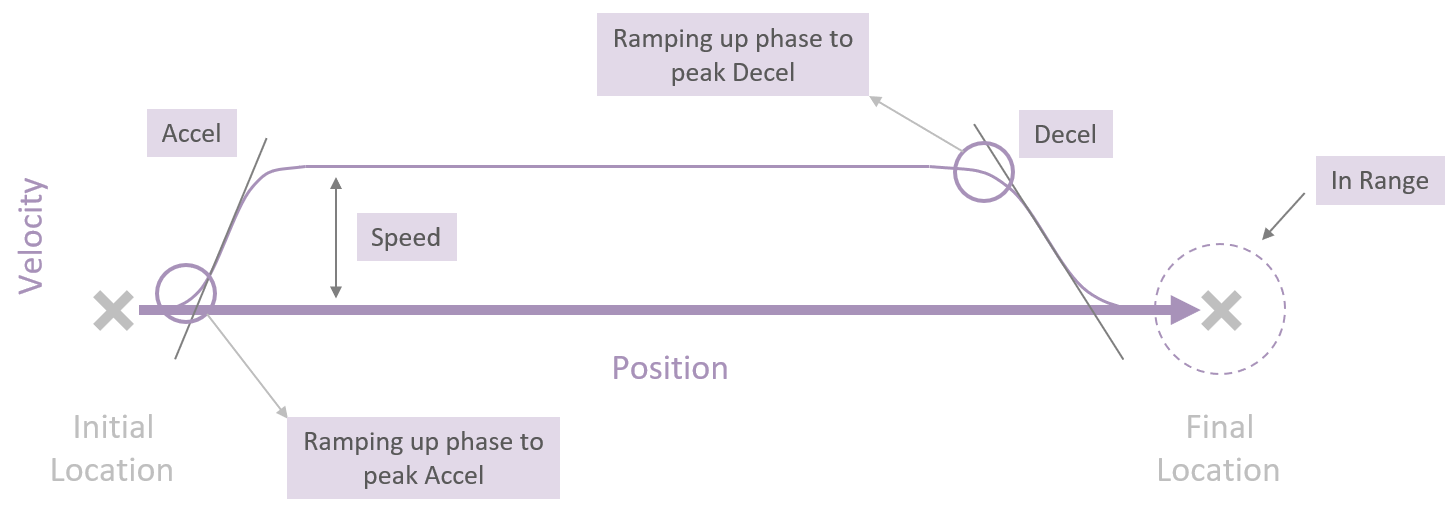
1 未満の入力値が線形加速度命令と角加速度命令で使用されている場合、これらの入力値は、ピーク加減速度までのランプアップの継続時間(秒)として使用されます(GPL コード:prof1.AccelRamp/prof1.DecelRamp = inputvalue)。
下の画像は、上に書いた概念と、コントローラーがどのようにロボットがたどるべき軌道を計画するかに関連する詳細な情報です。