Comau robots
このセクションでは、RoboDKからプログラムを生成し、それをComauロボットコントローラにロードするなど、Comauロボットを使用する際の典型的な操作の概要を説明します。
ロボットプログラムの転送
このセクションでは、Comauロボットコントローラにプログラムをロードする方法を説明します。
FTP経由でプログラム・フォームをプログラム・メモリにロードするには、以下の手順に従います。
1.ロボットの接続タブでIPアドレスを正しく設定してください。FTPユーザー名とパスワードがデフォルト値でない場合は、"more options "で設定できます。
2.プログラムを転送したい場合、プログラムを右クリックし、"ロボットに送信 "を選択するだけです。
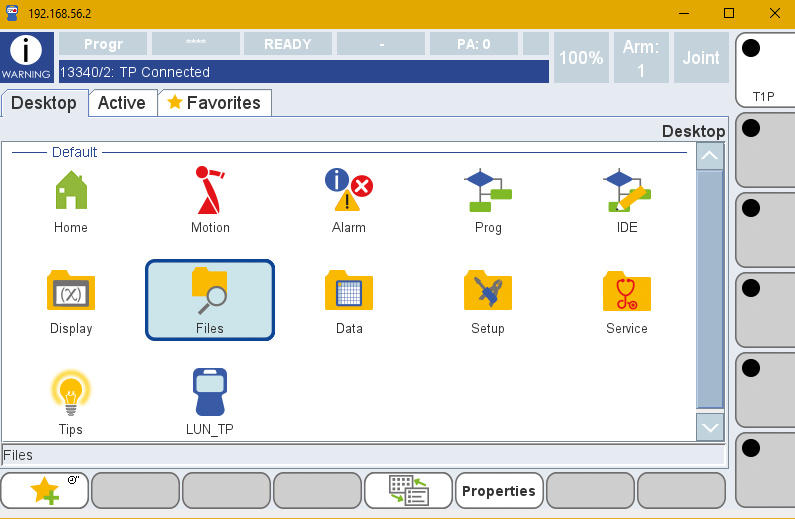
3.ロボットコントローラのティーチペンダントメインメニューから "Files "に移動します。
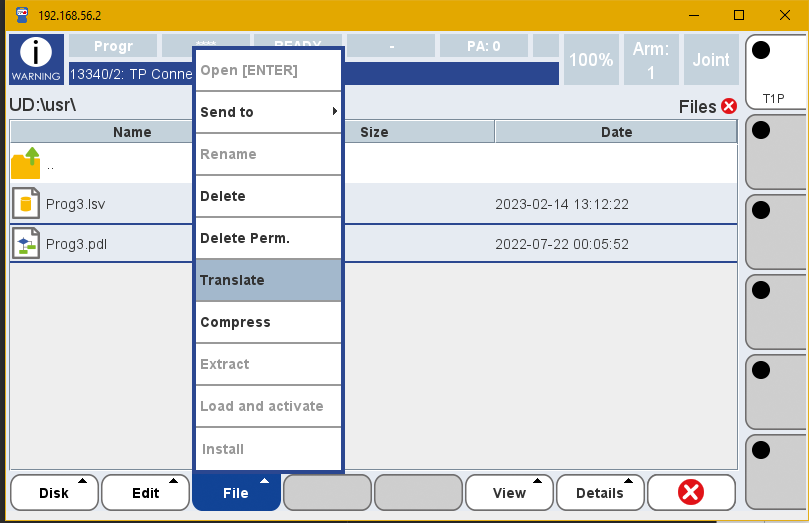
4.PDLプログラムと、必要に応じて対応するLSVを選択し、File->Translateをクリックしてプログラムを対応するコンパイルバージョンに変換します。
5.コンパイルされたファイルはメモリにロードされ、メインインターフェイスの "Prog "オプションで実行できます。
RoboDK をRoboShop のバーチャルロボットで使用する場合、FTP の同時接続数の上限を増やしておくとよいでしょう。この場合、バーチャルロボット上でターミナルを開き、以下の操作を行ってください。
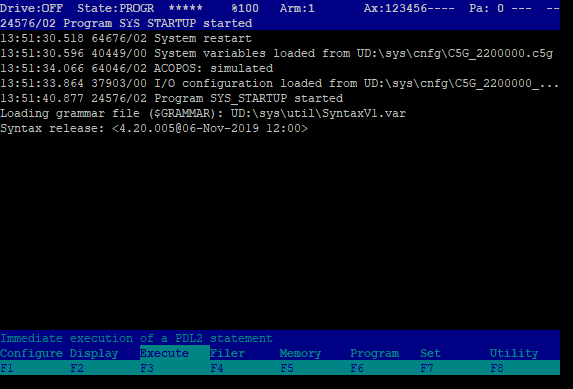
Roboshopのターミナルに移動し、ロボットのターミナル内で以下の手順に従ってください、
1.実行(F3)を選択
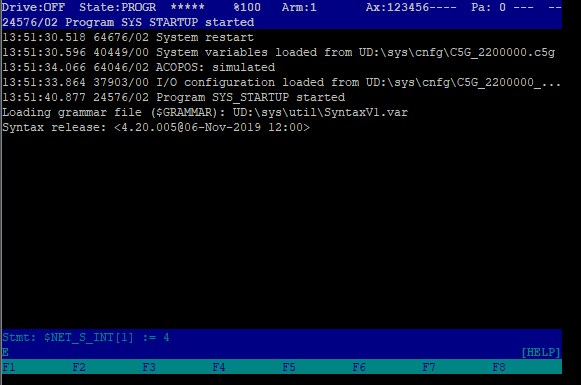
2.タイプ "$NET_S_INT[1] := 4"
3.Enter "キーを押してステートメントを確定します。
4.ステートメントを実行するには、2回目の "Enter "キーを押します。
ポストプロセッサー
Comauロボット用のロボットプログラムを作成する際には、ご使用のロボットがMODALまたはNODALプログラム用に設定されているかどうかを確認することが重要です。
Nodalプログラムでは、ロボットを右クリックし、"Select post processor "ボタンをクリックして、以下のポストプロセッサーを選択します。
●コマウ・ノーダル
モーダルプログラムの場合、ロボットを右クリックし、"Select post processor "ボタンをクリックして、以下のポストプロセッサーを選択してください:
●コマウ C5G
●コマウC5Gジョイント
ドライバー
コマウロボットでオンラインプログラミング機能を使用することができます。オンラインプログラミング機能を使用するためには、コマウロボットコントローラ側でドライバPDLプログラムファイルを実行してドライバをセットアップする必要があります。
注: Comauロボットコントローラ用のRoboDKドライバをダウンロードしてください。
以下の手順に従って、RoboDK 用の Comau ドライバをセットアップしてください:
1.RoboDKdriver.pdl ファイルを Comau ロボットコントローラに転送します。
2.ロボットのプログラムを手動で起動します(ロボットをサーバーに変換します)。
3.RoboDKからロボットに接続します。
デフォルトで使用される通信ポートは1102ですが、RoboDKdriver.pdlファイルで変更することができます。