デンソー用の
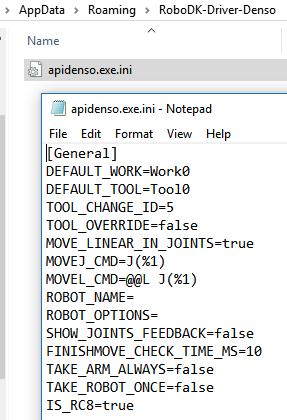
デンソー用のRoboDKドライバーは、特定の動作を実現するように高度にカスタマイズできます。このカスタマイズは、次の場所にあるiniファイルを編集することで実行できます:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
これらのカスタマイズにより、移動タイプを指定したり、同時に複数のロボットを駆動したりできます。任意のテキストエディターを使用して、このファイルが編集できます。
次の変数は変更できます:
●DEFAULT_WORK –デフォルトで使用される作業オブジェクト(文字列変数)。
●DEFAULT_TOOL –デフォルトで使用されるツール変数。
●TOOL_CHANGE_ID –新しいツールを設定する時に使用するスペアツール変数(例えば、5=Tool5)。
●MOVE_LINEAR_IN_JOINTS – falseに設定して、直線移動を直交座標ターゲットとして提供。
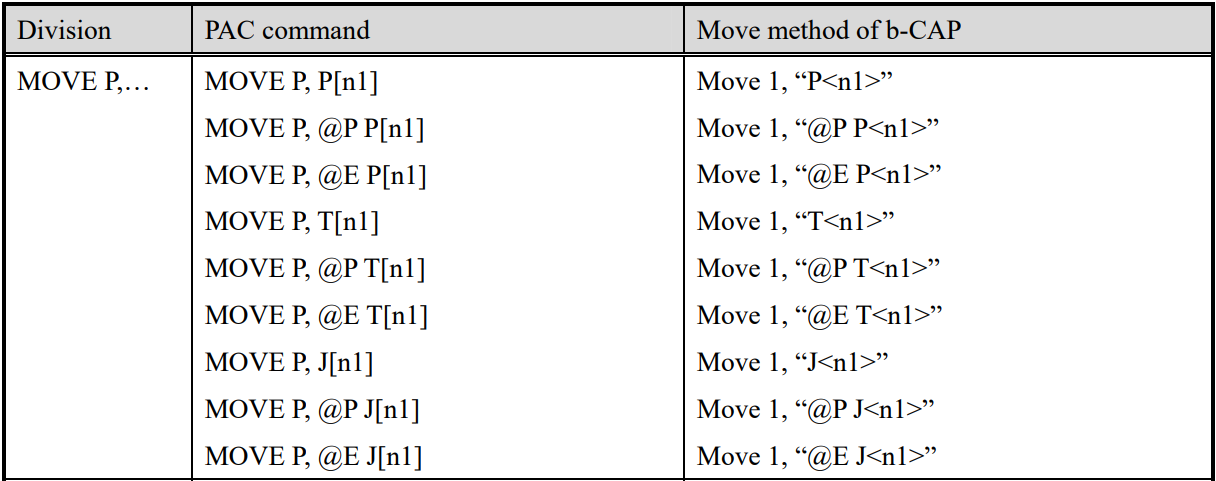
●MOVEJ_CMD –関節移動(MoveJ)用に送信するコマンド。次の表が、使用できる設定を示します。
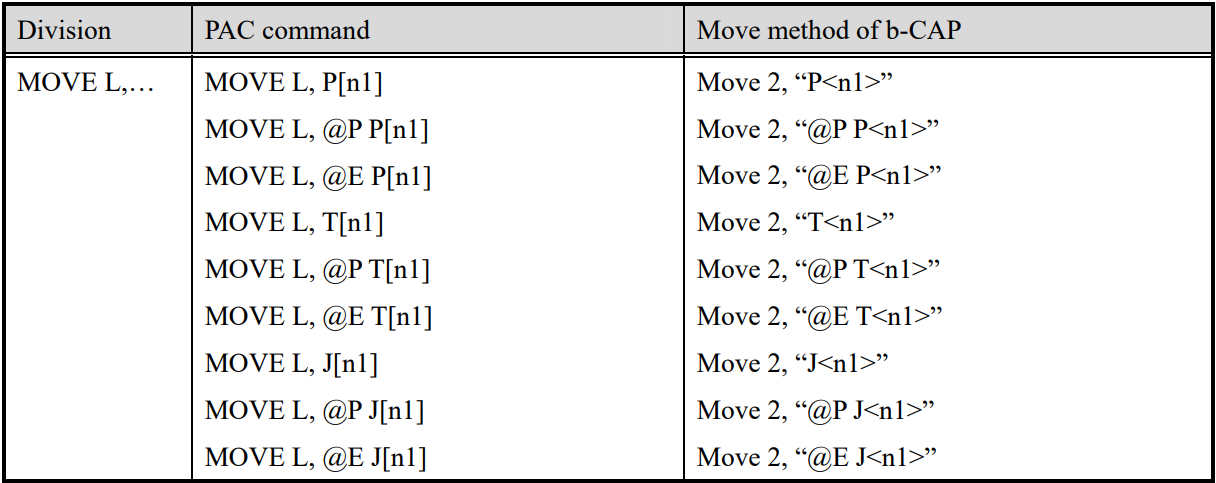
●MOVEL_CMD-直線移動(MoveL)用に送信するコマンド。次の表に、使用できる設定を示します。
●ROBOT_NAME–ロボットの名前。名前を指定して、コントローラーの特定のロボットを選択
●ROBOT_OPTIONS–ロボットリソースを取得するためのロボット設定。例えば、コントローラーの奴隷ロボットを使用している場合、ROBOT_OPTIONS =”ID=1”を指定する必要があります。マスターロボット(メインロボット)が使用したい場合は、IDを0(デフォルト)にする必要があります。
●SHOW_JOINTS_FEEDBACK – trueに設定して、画面にロボットのフィードバックをリアルタイムで表示します(性能が低下する可能性があります)。
●FINISH_MOVE_CHECK_MS –関節のフィードバックを表示する時に画面上のロボット位置を更新する速度を設定します。
●TAKE_ARMS_ALWAYS – trueに設定して、ロボットが切断するまでコントローラーのリソースを保持します(加速しますが、予想外の結果につながる可能性があります)。
●TAKE_ROBOT_ONCE – trueに設定して、ロボットが接続されている間は各移動後にロボットリソースを保持します(加速しますが、予想外の結果につながる可能性がありま)。
●IS_RC8 – RC7以前のデンソーコントローラーに適切に接続するには、falseに設定します。