PC
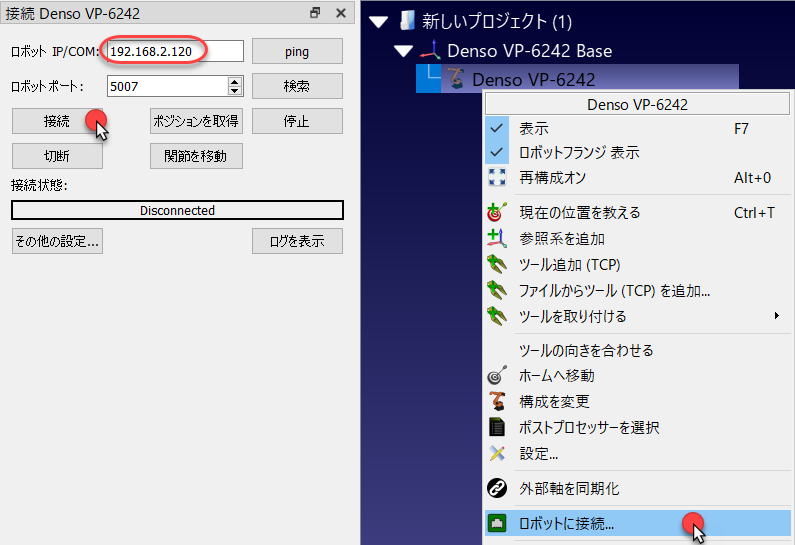
ネットワーク接続が成立している場合、ロボットプログラムをRoboDKから実際のロボットに直接実行できます。
1.RoboDKでロボットを右クリックします
2.選択:
3.ロボットのIPを入力してください
4.接続を選択。
接続が成功した場合、準備完了を示す緑色のメッセージが表示されます。
接続メニューからロボット関節を取得、関節を移動、直線移動を選択すると、ロボットが動かせます。
メモ:この通信を可能にする為には、ロボットコントローラーのb-Capサーバーを有効にする前の項目を読んでください。
ヒント:ロボットが応答しなくなった場合、切断ボタンをダブルクリックすると、ドライバーのプロセスが強制停止します。次に、再度接続を選択すると、正しく接続が再開されます。
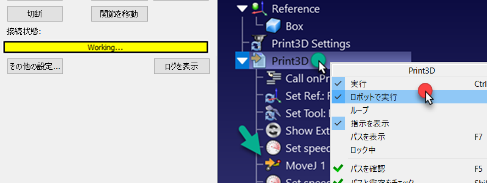
ロボットで実行機能を使用して、RoboDKでフィードバックを得ながらロボットが動かせます(オンラインプログラミング)。この方法は、ロボットをサーバーとして使用し、各指示をシミュレーターで実行されると同時にロボットに段階的に送信します。この方法はデバッグをする際に役立ちます。
1.プログラムを右クリックします(次の画像ではPrint3Dを)。
2.ロボットで実行を選択
3.プログラムをダブルクリックして開始します(または右クリックして実行を選択)。
この設定をチェックすると、プログラムをダブルクリックするたびに実際のロボットと接続します(または右クリックして実行を選択すると)。
これらの操作は、ロボットプログラミングを他のアプリケーションと統合できるようにRoboDK APIからも使用できます。APIは、Python、C#、およびその他のプログラミング言語で使用できます。