デンソーロボット#Denso
RoboDKは、Densoロボットがオフラインプログラミングに使用するPACおよびPacScriptプログラミング言語をサポートしています。対応するポストプロセッサーを選択して、ロボットプログラムが生成できます。
●PAC(RC7以前のコントローラー)
●PacScript(RC8以降のコントローラー)
さらに、RoboDKはRC7およびRC8 のデンソーコントローラーのオンラインプログラミングもサポートしています。これは、デンソー用のデフォルトRoboDKドライバーで可能です。古いまたは新しいバージョンも部分的にサポートされている場合があります。
このドキュメントは主に、デンソーのロボットコントローラーでのオンラインプログラミング機能の使用方法に関する情報を提供します。
ロボットドライバーは、オフラインプログラミングの代替手段を可能にします(プログラムが生成され、ロボットに転送されて実行されます)。ロボットドライバーを使用すると、直接ロボットにシミュレーションが実行できます(オンラインプログラミング)。詳細については、ロボットドライバー項目へ。
b-Capサーバーを有効にする方法
デンソーのロボットドライバー(オンラインプログラミング)を使用するには、b-Capサーバーを有効にする必要があります。
次の手順を辿って、ロボット側でb-Capサーバーを有効にします。
1.ロボットコントローラーを手動(Manual)モードに切り替えます。
2.設定を選択し、パスワード1214を入力して、ORiN設定を有効にします。
3.イーサネット通信許可を可能に:通信設定メニュー-許可-読み取り/書き込みを設定
4.通信設定メニューでコントローラーの実行可能トークンをイーサネットに設定します。これにより、コンピューターからプログラムが起動できます。
PCからプログラムを実行
ネットワーク接続が成立している場合、ロボットプログラムをRoboDKから実際のロボットに直接実行できます。
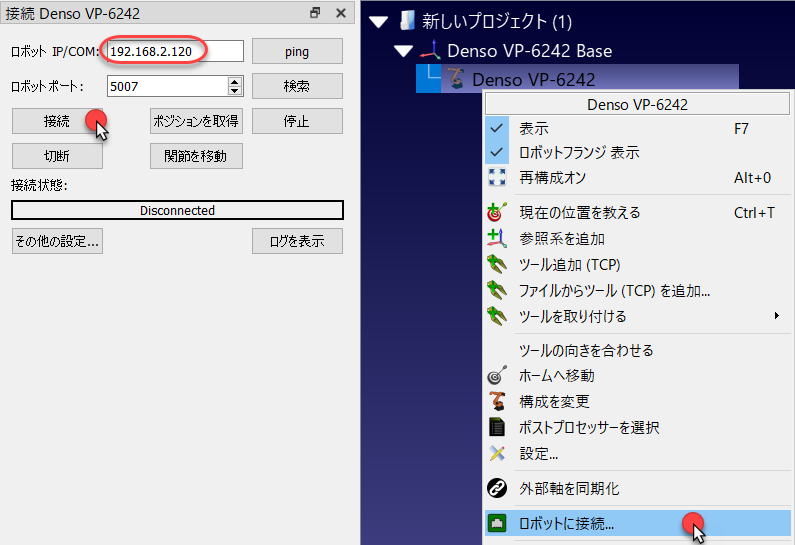
1.RoboDKでロボットを右クリックします
2.選択:
3.ロボットのIPを入力してください
4.接続を選択。
接続が成功した場合、準備完了を示す緑色のメッセージが表示されます。
接続メニューからロボット関節を取得、関節を移動、直線移動を選択すると、ロボットが動かせます。
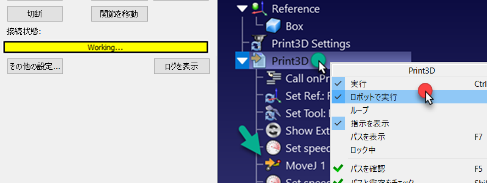
ロボットで実行機能を使用して、RoboDKでフィードバックを得ながらロボットが動かせます(オンラインプログラミング)。この方法は、ロボットをサーバーとして使用し、各指示をシミュレーターで実行されると同時にロボットに段階的に送信します。この方法はデバッグをする際に役立ちます。
1.プログラムを右クリックします(次の画像ではPrint3Dを)。
2.ロボットで実行を選択
3.プログラムをダブルクリックして開始します(または右クリックして実行を選択)。
この設定をチェックすると、プログラムをダブルクリックするたびに実際のロボットと接続します(または右クリックして実行を選択すると)。
これらの操作は、ロボットプログラミングを他のアプリケーションと統合できるようにRoboDK APIからも使用できます。APIは、Python、C#、およびその他のプログラミング言語で使用できます。
デンソー用のRoboDKドライバー
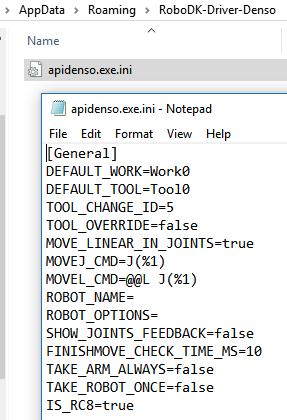
デンソー用のRoboDKドライバーは、特定の動作を実現するように高度にカスタマイズできます。このカスタマイズは、次の場所にあるiniファイルを編集することで実行できます:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
これらのカスタマイズにより、移動タイプを指定したり、同時に複数のロボットを駆動したりできます。任意のテキストエディターを使用して、このファイルが編集できます。
次の変数は変更できます:
●DEFAULT_WORK –デフォルトで使用される作業オブジェクト(文字列変数)。
●DEFAULT_TOOL –デフォルトで使用されるツール変数。
●TOOL_CHANGE_ID –新しいツールを設定する時に使用するスペアツール変数(例えば、5=Tool5)。
●MOVE_LINEAR_IN_JOINTS – falseに設定して、直線移動を直交座標ターゲットとして提供。
●MOVEJ_CMD –関節移動(MoveJ)用に送信するコマンド。次の表が、使用できる設定を示します。
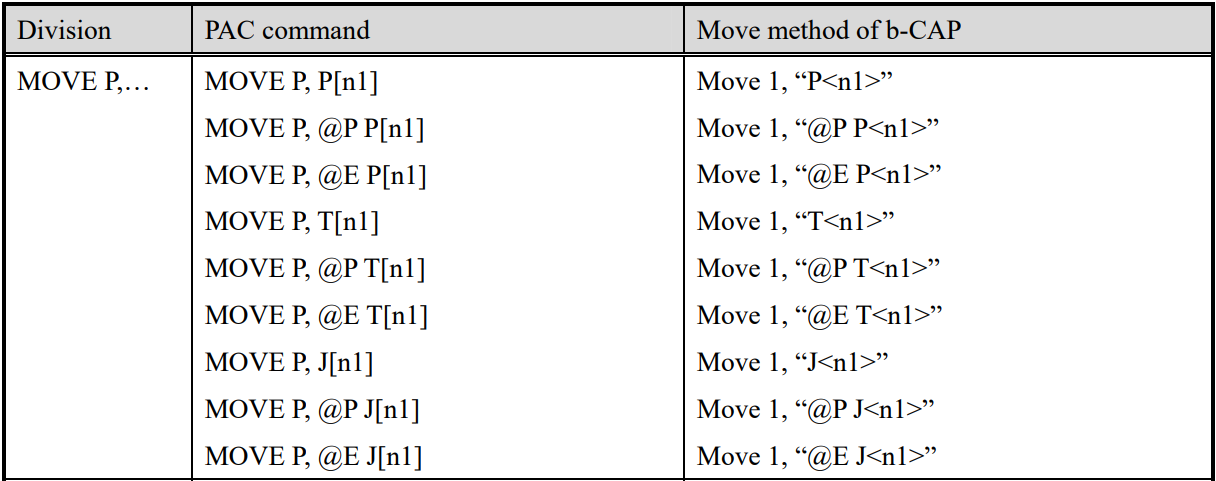
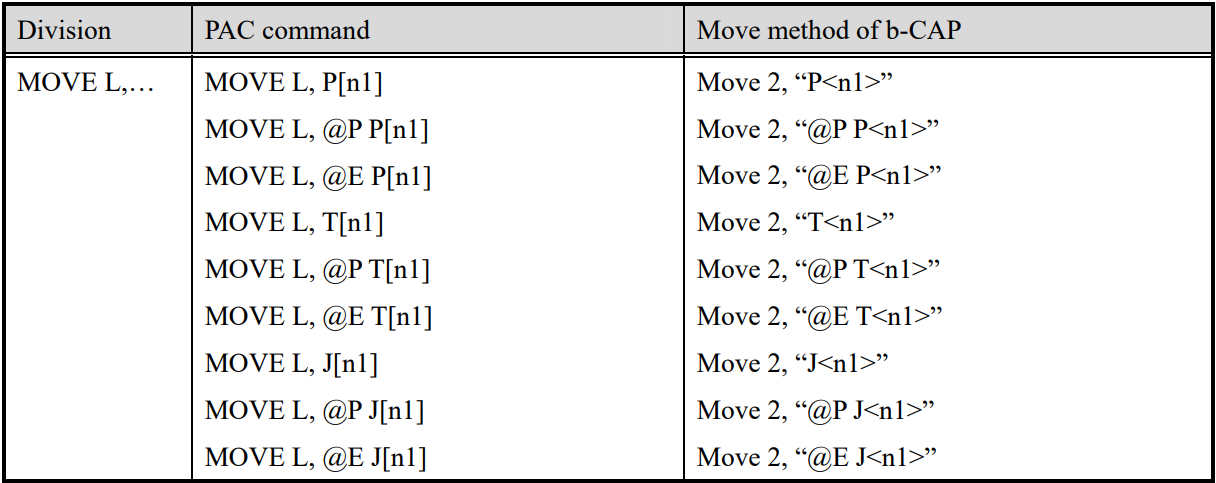
●MOVEL_CMD-直線移動(MoveL)用に送信するコマンド。次の表に、使用できる設定を示します。
●ROBOT_NAME–ロボットの名前。名前を指定して、コントローラーの特定のロボットを選択
●ROBOT_OPTIONS–ロボットリソースを取得するためのロボット設定。例えば、コントローラーの奴隷ロボットを使用している場合、ROBOT_OPTIONS =”ID=1”を指定する必要があります。マスターロボット(メインロボット)が使用したい場合は、IDを0(デフォルト)にする必要があります。
●SHOW_JOINTS_FEEDBACK – trueに設定して、画面にロボットのフィードバックをリアルタイムで表示します(性能が低下する可能性があります)。
●FINISH_MOVE_CHECK_MS –関節のフィードバックを表示する時に画面上のロボット位置を更新する速度を設定します。
●TAKE_ARMS_ALWAYS – trueに設定して、ロボットが切断するまでコントローラーのリソースを保持します(加速しますが、予想外の結果につながる可能性があります)。
●TAKE_ROBOT_ONCE – trueに設定して、ロボットが接続されている間は各移動後にロボットリソースを保持します(加速しますが、予想外の結果につながる可能性がありま)。
●IS_RC8 – RC7以前のデンソーコントローラーに適切に接続するには、falseに設定します。