ドライバ設定
INI ファイルを使用してドライバの追加設定を行うことができます。これにより、外部軸のマッピング方法を設定できます。
ドライバを初めて実行すると、外部軸マッピングなどのドライバの高度なパラメータを設定するためのフラグを含むファイルが生成されます。この設定ファイルの場所は、ドライバのログの先頭のLoading settingsで始まる行にあります。
ヒント: 複数のカスタムコンフィギュレーションが必要な場合は、一意の名前を持つドライバのコピーを作成するだけです。
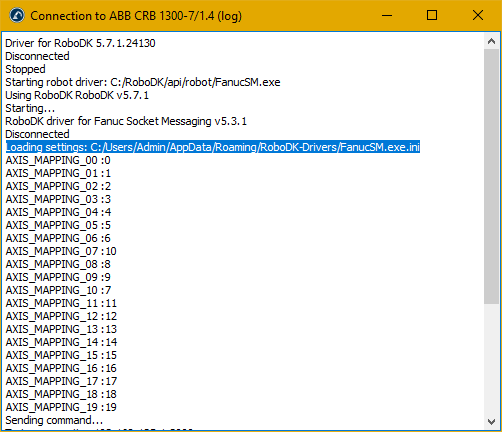
このファイルをテキストエディタで開くと、RoboDKで使用する軸とファナックのロボットコントローラ側で対応する軸のリストが表示されます。さらに、追加のデバッグ印刷を有効にしたり、使用するモーショングループの数を変更したりすることもできます。
例えばRoboDKの軸8がロボットコントローラの軸9に対応している場合、右側の数字を正しい値に変更するだけです。
軸 0 ~ 9 はモーショングループ 1 で、軸 10 ~ 17 はモーショングループ 2 です。したがって、外部軸が第 2 モーショングループにある場合、構成ファイルの軸 10 に対応します。