ファナック用
RoboDKとファナックのロボットコントローラの接続を確立し、RoboDKを使って接続されたPCからロボットを自動的に動かすことができます。
これにより、RoboDK Run on robot オプションを使用してオンラインプログラミングやデバッグを行うことができます。接続は標準的なイーサネット接続(TCP/IP)で行うことができます。
ロボットドライバーはオフラインプログラミング(プログラムを生成し、ロボットに転送して実行する)の代替手段を提供します。ロボットドライバーを使用すると、ロボット上で直接シミュレーションを実行することができます(オンラインプログラミング)。詳細はロボットドライバーのセクションをご覧ください。
注:この動作モードには、ファナックソフトウェアオプションのUser Socket Messaging(コントローラによりR636またはR648)とPC Interface(R641)が必要です。PCファイル(R632)を実行するには、Karelオプションも必要です。また、PCDKオプションを使用することも可能です(必ずFanucPCDKドライバを選択してください)。
ファナック用RoboDKドライバーをセットアップするには、以下の手順に従ってください:
1.カスタマーエリアからファナックのドライバプログラムファイルをダウンロードし、以下のロボットプログラムをファナックのロボットコントローラに転送します:
a.RDK_S3.PC➔ S3(ソケット通信ポート番号3 - S3)を介した通信を管理するメインプログラムです。正しいバージョンを選択してください(最新のファナックロボットコントローラではV9フォルダの下のバージョンを使用する必要があります)。
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
ロボットティーチペンダントの以下の手順に従って、ファナックロボットと RoboDK との通信の準備をしてください:
1.メニュー」-「次へ」-「システム」-「TYPE」-「変数」を選択します。
a.HOSTS_CFGを選択します。
b.3番を選択
c.SERVER_PORTを2000に設定します。
($hosts_cfg[3].$server_port = 2000)
2.メニュー-セットアップを選択
3.TYPE]-ホストコマンドを選択
4.SHOW]-サーバーを選択
5.S3」を選択-Enter。
a.プロトコル名をSMに設定
b.複数のポートが利用可能な場合は、「ポート名」でPortをP3(または対応するポート)に設定します。
c.非アクティブ時のタイムアウトを9999に設定
d.起動状態を[CHOICE] STARTに設定
e.現在の状態をSTARTED に設定します:
そのためには、[ACTION]-DEFINEを選択し、次に[ACTION]-STARTを選択します。
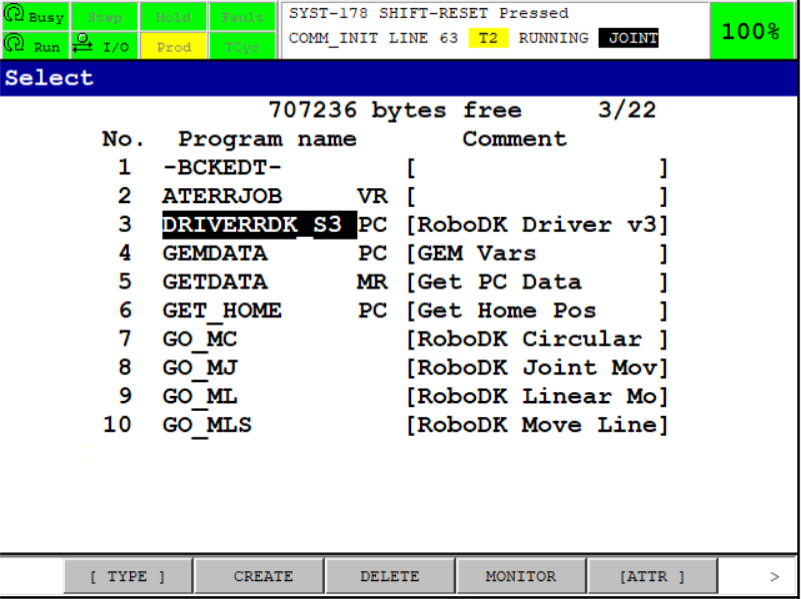
6.RDK_S3プログラムを起動します:
a.ティーチペンダントからSelectボタンを選択します。
b.RDK_S3プログラムの方へスクロールダウンしてください。
c.Enter(ティーチペンダントからボタン)を選択します。
d.シフト・リセットとシフト・フォワードを選択してプログラムを開始します。
ティーチペンダントにRUNNINGメッセージが表示されるはずです。プログラムの実行に失敗した場合は、ロボットオプション(PCインターフェースまたはユーザーソケットメッセージング)を持っていないか、PCプログラムの正しいバージョンを取っていない可能性があります。
注意:72行目で "Undefined built-in "のようなエラーメッセージが表示された場合は、ロボットコントローラにUser Socket Msgオプションがないことを意味します。
7.RoboDKでロボットのIPを指定し、Connectを選択してロボットに接続します。
注意:通信に失敗したり、ロボットがエラーモードになった場合は、RDK_S3プログラムを再起動してRoboDKから再接続してください。
注意:RoboDKでもFanucでもデフォルトでは2000番ポートが使われています。セクション1.cのポートは異なっていてもかまいませんが、RoboDKでは同じポートを指定する必要があります(ロボット接続メニューの "Robot port "セクション)。
注:ロボット通信が正しく動作するためには、プログラムRDK_S3が選択され、実行されている必要があります。S3レジスタがロボットドライバに使用できない場合は、別のSレジスタを使用する別のPCファイル(RDK_S4など)をロードしてください。
注:位置や追加のEXEがある場合、またはRoboDKのデフォルト軸マッピングが実際のロボットの軸マッピングを反映していない場合は、%appdata%RoboDK-Drivers FanucSM.exe.iniにあるファイルを編集してドライバーのマッピングを変更することができます。詳細については、最後の上級者向けセクションを参照してください。
ドライバ設定
INI ファイルを使用してドライバの追加設定を行うことができます。これにより、外部軸のマッピング方法を設定できます。
ドライバを初めて実行すると、外部軸マッピングなどのドライバの高度なパラメータを設定するためのフラグを含むファイルが生成されます。この設定ファイルの場所は、ドライバのログの先頭のLoading settingsで始まる行にあります。
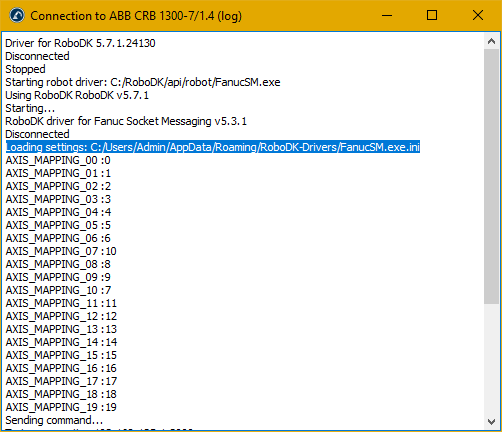
このファイルをテキストエディタで開くと、RoboDKで使用する軸とファナックのロボットコントローラ側で対応する軸のリストが表示されます。さらに、追加のデバッグ印刷を有効にしたり、使用するモーショングループの数を変更したりすることもできます。
例えばRoboDKの軸8がロボットコントローラの軸9に対応している場合、右側の数字を正しい値に変更するだけです。
軸 0 ~ 9 はモーショングループ 1 で、軸 10 ~ 17 はモーショングループ 2 です。したがって、外部軸が第 2 モーショングループにある場合、構成ファイルの軸 10 に対応します。