コントローラキネマティックパラメータの更新
このセクションでは、RoboDKのキャリブレーションとパフォーマンスパッケージを使ってロボットをキャリブレーションした後、ロボットコントローラのキネマティックパラメータ(DHテーブル)を更新する方法について説明します。
コントローラの DH パラメータを変更すると、コントローラに手動で作成したすべてのプログラムに影響します。コントローラの工場出荷時の設定に戻す場合に備え、元の DH パラメータのコピーを保管してください。
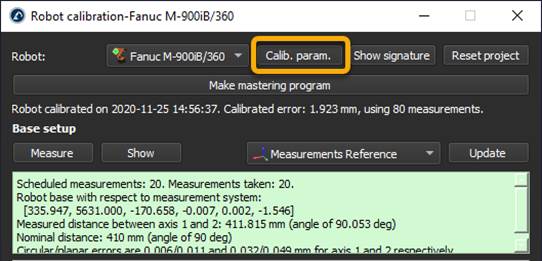
1.較正ウィンドウで、較正パラメータを開きます。
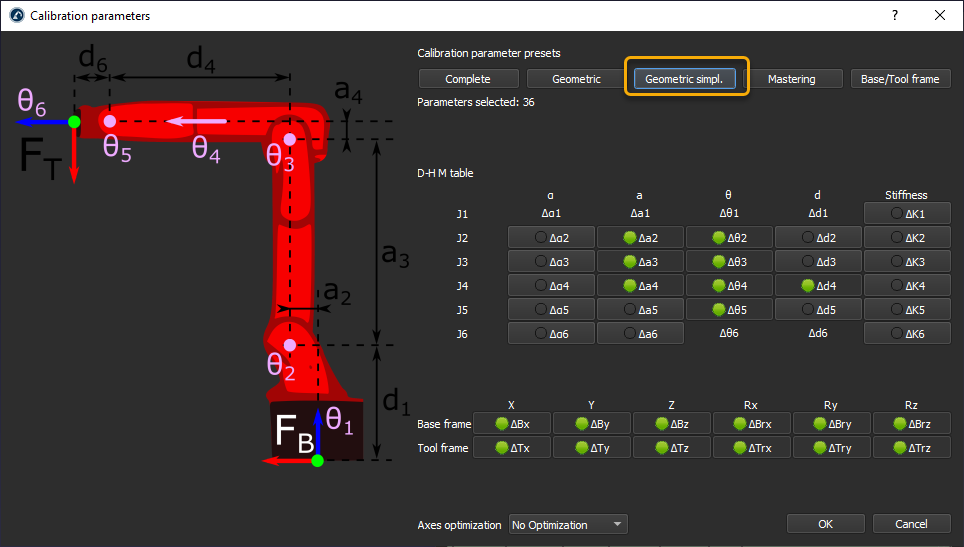
2.ジオメトリックを選択します。
3.較正シーケンスを実行するか、既存のシーケンスを更新します。

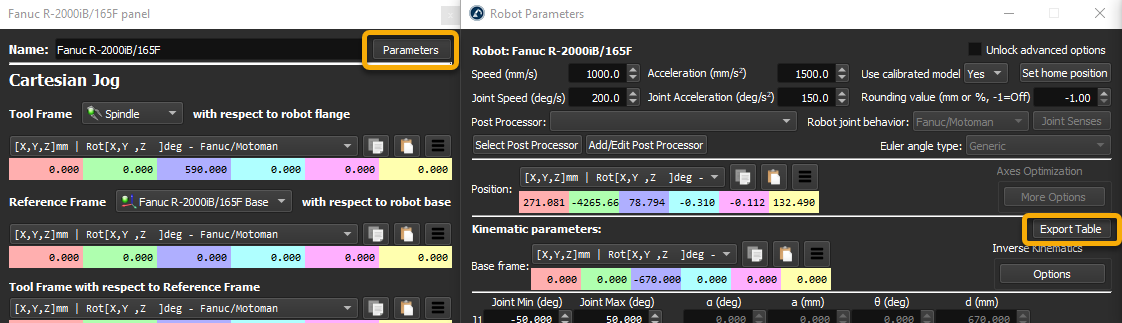
4.ロボットの較正済みDHパラメータを取得します。RobotパネルでParametersを選択します。次にExport Tableを選択します。
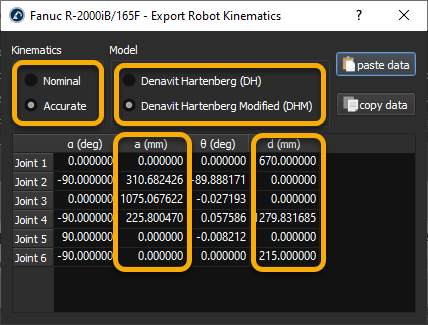
5.必ずAccurate kinematicsを使用してください。NominalはコントローラのデフォルトDHパラメータと比較するために使用できます。
6.コントローラのパラメータを変更するには、Danavit Hartenberg Modifiedモデルを使用します。
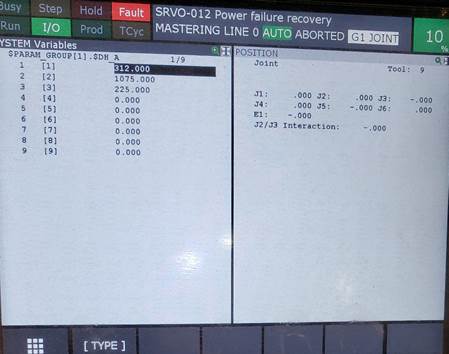
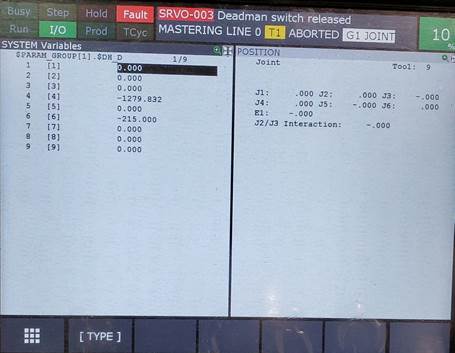
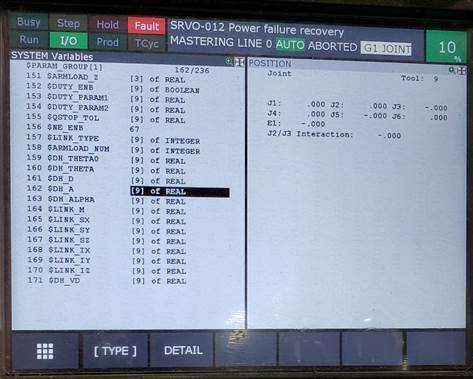
7.ロボットティーチペンダントで、システム変数→$PARAM_GROUP[1]を開きます。
8.DH_A と $DH_D パラメータを見つけてください。
9.Export Robot Kinematicsウィンドウのa値とd値でDH値を修正します。