プログラムのコンパイル(
ここでは、ファナック LS と TP のプログラムファイルの違いと、RoboDK を使ってファナックロボット用のプログラムを自動的にコンパイルする方法について説明します。
ファナックロボット(TP、TPPとも呼ばれる)でロボットプログラムを実行するにはバイナリファイルが必要です。オフラインプログラミングソフトウェア(RoboDKなど)で生成されたファナックロボット用のプログラムはLSフォーマット(ASCII、テキスト可読、コンパイル不可)です。LS形式のロボットプログラムをTP形式に変換するには2つの方法があります:
1.ロボットにASCII Uploadソフトウェアオプションを搭載してください。このオプションはすでにロボットで利用可能かもしれません。このオプションが使用可能かどうかを確認する最良の方法は、ロボットにLSファイルを提供し、それが自動的にTPファイルに変換されることです。例えば、ファイルをFRディスクに置き、ティーチペンダントでLOADを選択します。
2.ロボガイドのWinOLPCツールを使ってプログラムをコンパイルします。この場合、RoboDK がインストールされているコンピュータで、ファナックのコンパイラツール "maketp.exe" を使って LS プログラムを自動的にコンパイルすることができます。このコマンドには " robot.ini " ファイルが必要です。このファイルは、ロボガイドがインストールされ、ワークステーションがコンピュータに保存されていれば、WinOLPCのsetrobot.exeユーティリティで生成できます(「ワークセル」)。
RoboguideのWinOLPCツールがデフォルトの場所にインストールされていれば、LSプログラムが生成された直後にRoboDKが自動的にTPプログラムを生成します。
setrobot実行ファイルを用いてロボットを選択したことを確認してください。TPファイルが生成されず、ロボガイドWinOLPCがインストールされている場合は、以下の手順が必要です:
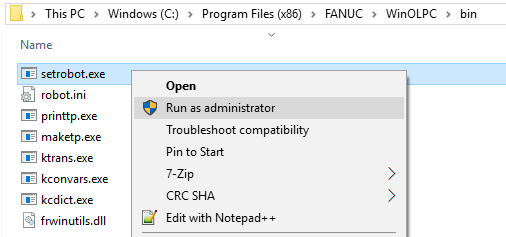
1.Windowsエクスプローラを開き、WinOLPCのインストールフォルダに移動します:
C:◆Program Files (x86)◆FANUC◆Win◆PC◆bin
2.setrobot.exeファイルを右クリックし、管理者として実行を選択します。
3.ロボットのワークセルを選択します。
または、以下のフォルダの内容をデフォルトフォルダからコピーすることもできます:
C:◆Program Files (x86)◆FANUC◆Win◆PC◆bin
をフォルダに追加します:
C:♪RoboDKapi♪Fanuc
注意:コンパイラのバージョンを尊重することが望ましいですが、必須ではありません。コンパイルは、仮想 WorkCell ロボットと実際のロボットが同じ軸数、同じオプション設定であれば動作するはずです。robot.iniファイルがあれば、ロボットを変更するたびにsetrobot.exeを使わなくてもmaketp.exeを使うことができます。
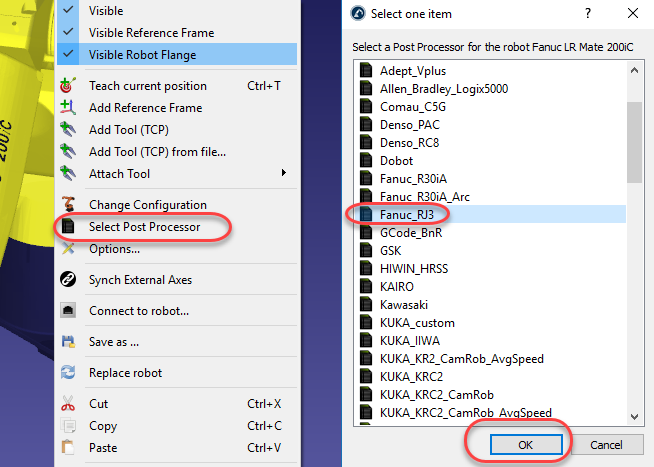
ファナックRJ3コントローラと互換性のあるポストプロセッサを選択するには、以下の手順に従ってください:
1.ロボットを右クリック
2.ポストプロセッサーを選択
3.ファナックRJ3を選択
4.プログラムの生成 (F6)
Roboguide WinOLPC をデフォルトの場所にインストールしておらず、RoboDK からプログラムを生成する際に自動的に TP ファイルを取得したい場合は、以下の手順に従ってください:
1.Program➔ Add/Edit ポストプロセッサーを選択します。
2.Fanuc RJ3(または使用したいポストプロセッサ)を選択します。すべてのポストプロセッサーはフォルダからもアクセスできます:C:/RoboDK/Posts/.また、コンパイルされたポストプロセッサを使用していないことを確認してください。
3.変数PATH_MAKE_TP(103行目あたり)を見つけて、maketp実行ファイルがあるパスを入力してください。
ファナックのロボット用RoboDKポストプロセッサは、ターンテーブルやリニア軸などの外部軸と同期した6軸ロボットの使用をサポートしています。
注:ポストプロセッサのカスタマイズに関する詳細は、「ポストプロセッサ」のセクションを参照してください。