ロボットプログラムの転送
USBドライブからプログラムをロードするには、以下の手順を踏む必要があります:
1.USBドライブをティーチペンダントに差し込みます。
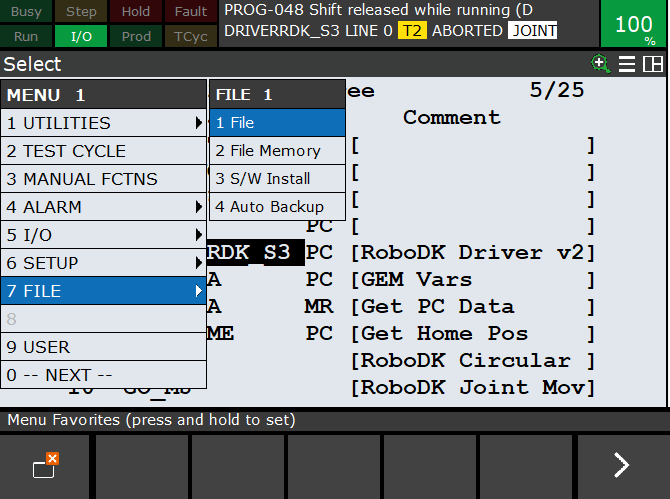
2.メニューを選択➔ ファイル
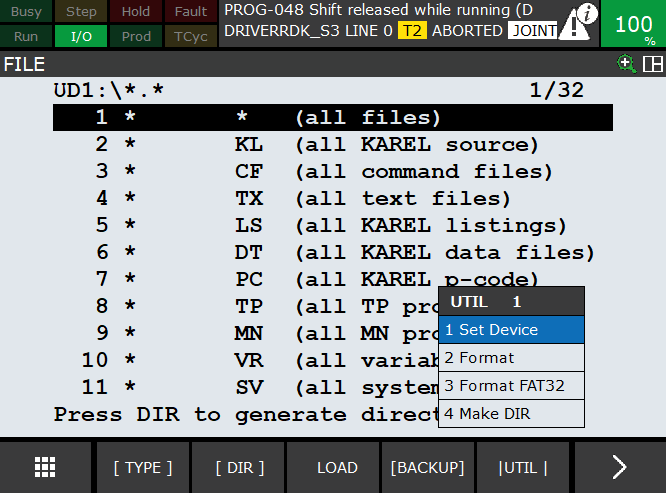
3.ユーティリティを選択➔ デバイスを設定➔ USB
4.DIRを選択
5.USBディスクからTPまたはLSプログラムファイル(例:BALLBARTEST.TP)を選択します。
自動的にコントローラのFRメモリに保存されます。
6.FRメモリ内のプログラムを選択し、LOAD(画面ボタン)を選択します。
重要:オフラインプログラミングには、ASCII Uploadオプションが必要です。これにより、LSファイルを直接コントローラにロードできます。また、ファナックのWinOLPCツール(MakeTP)を使用して、PCからLSプログラム(ASCIIファイル)をTPプログラム(バイナリファイル)にコンパイルすることもできます。
重要: RoboDK で作成されたプログラムの直線速度は、デフォルトではレジスタ R[10] で定義されています。プログラム中に速度が設定されていない場合は、手動で設定する必要があります。その場合は
を選択してください:DATA➔ Type➔ Register, R[10]=50 (速度 50 mm/s の場合)