ファナックロボット
このセクションでは、ファナックロボットを使って RoboDK で新しいプログラムを作成し、ロボットに転送するまでの典型的な操作の概要を説明します。RoboDK は、RJ3、R-30iA、R-30iB を含む、RJ2 以降のすべてのファナック製ロボットコントローラに対応しています。このドキュメントは R-30iA ファナックコントローラに基づいています。
注: LSプログラムとTPプログラムの比較で説明したように、オフラインで生成されたLSプログラムファイルを問題なく簡単に転送するには、ファナックのロボットコントローラでASCIIアップロードオプション(R507)を要求することをお勧めします。
ロボットプログラムの転送
USBドライブからプログラムをロードするには、以下の手順を踏む必要があります:
1.USBドライブをティーチペンダントに差し込みます。
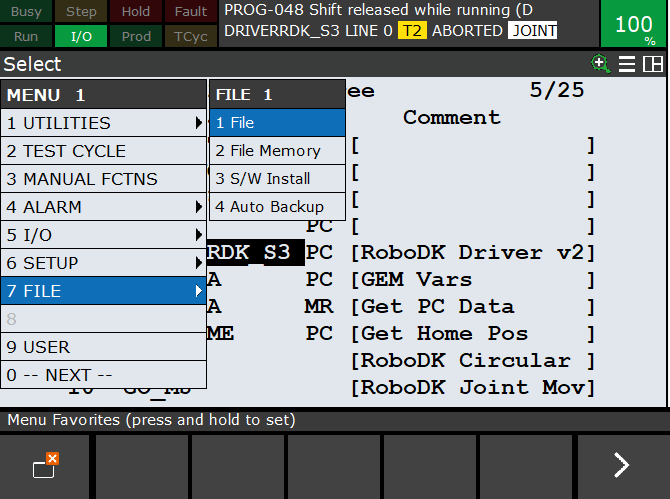
2.メニューを選択➔ ファイル
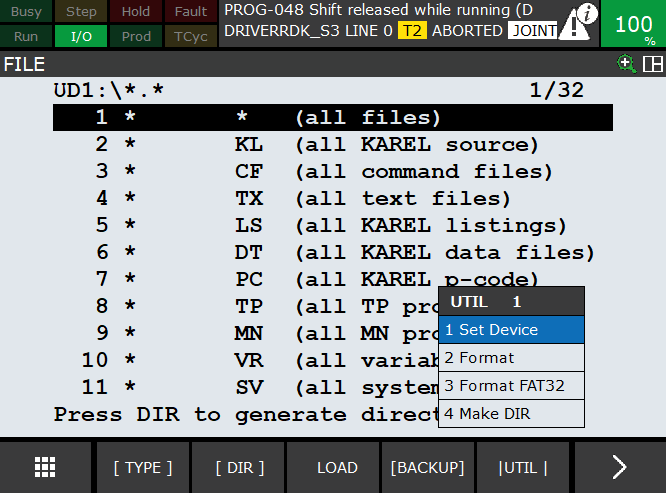
3.ユーティリティを選択➔ デバイスを設定➔ USB
4.DIRを選択
5.USBディスクからTPまたはLSプログラムファイル(例:BALLBARTEST.TP)を選択します。
自動的にコントローラのFRメモリに保存されます。
6.FRメモリ内のプログラムを選択し、LOAD(画面ボタン)を選択します。
重要: RoboDK で作成されたプログラムの直線速度は、デフォルトではレジスタ R[10] で定義されています。プログラム中に速度が設定されていない場合は、手動で設定する必要があります。その場合は
を選択してください:DATA➔ Type➔ Register, R[10]=50 (速度 50 mm/s の場合)
ロボットプログラムの開始
ファナックのロボットコントローラでロボットプログラムを開始するには、以下の手順に従ってください。
1.FCN を選択(ティーチペンダントボタン)➔ すべて中止
2.セレクトSELECT(ティーチペンダントボタン)
3.プログラムを選択(例:BALLBARTEST)
4.デッドマンスイッチを長押し
5.リセット] を選択します。すべてのアラームが消えます。
6.ティーチのSHIFTボタンを長押しします。
7.FWD(ティーチペンダントのボタン)を選択します。
ロボットジョイントの取得
ファナックのティーチペンダントで以下の手順に従って、実際のロボットのロボットジョイントを取得します。
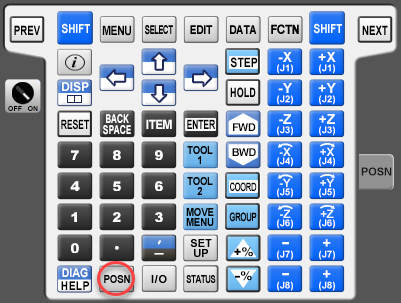
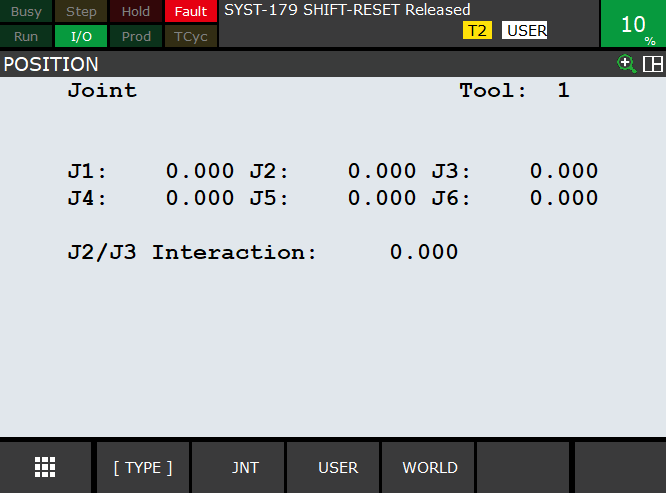
1.POSN(ティーチペンダントのボタン)を選択し、ロボットの現在位置を確認します。
2.画面上でJNTを選択するか、COORD(ティーチペンダントのボタン)を選択して結合モードを選択します。
ロボットツールの取得 (TCP )
ロボットツールはファナックのコントローラ(UTOOL)のレジスタとして保存されます。これらの手順により、ロボットツール(TCP、ファナックのロボットプログラミングではUTOOLとも呼ばれる)を作成または変更することができます。
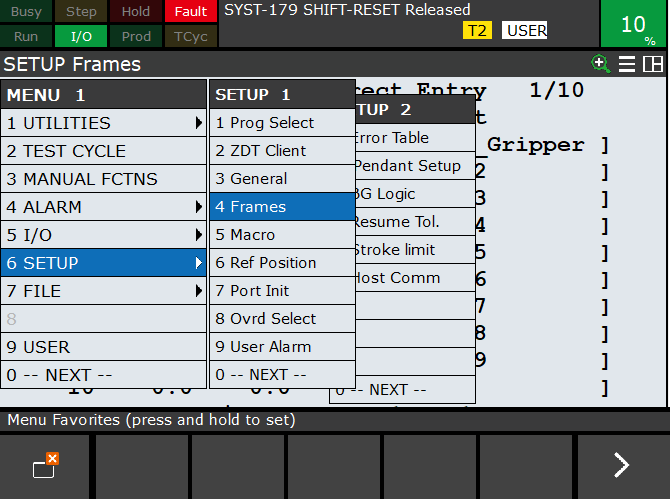
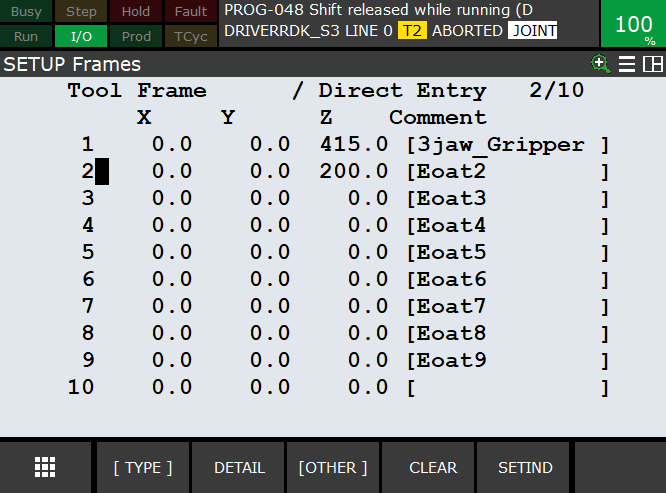
1.MENU を選択➔ セットアップ➔ フレーム
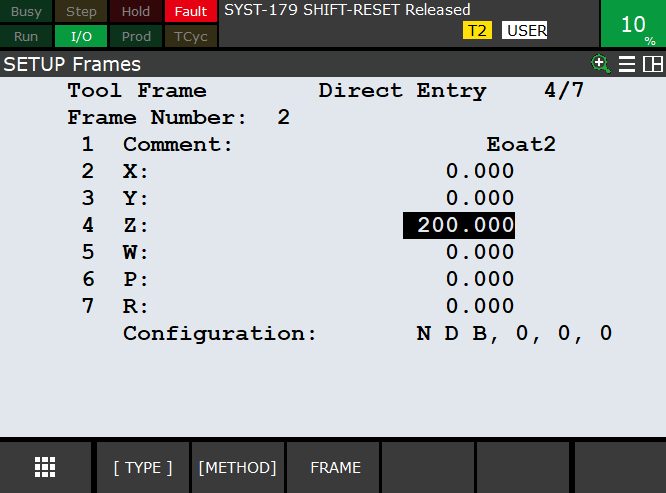
2.矢印またはタッチスクリーンを使用してツールを選択し、ENTERを選択します。
3.必要に応じてX,Y,Z,W,P,Rの値を変更してください。
注意:RoboDKから生成されたプログラムは、RoboDKシミュレーションで定義したとおりにロボットコントローラにツールを設定することができます。この動作は、使用するポストプロセッサやRoboDKでのプログラム生成方法によって異なります。
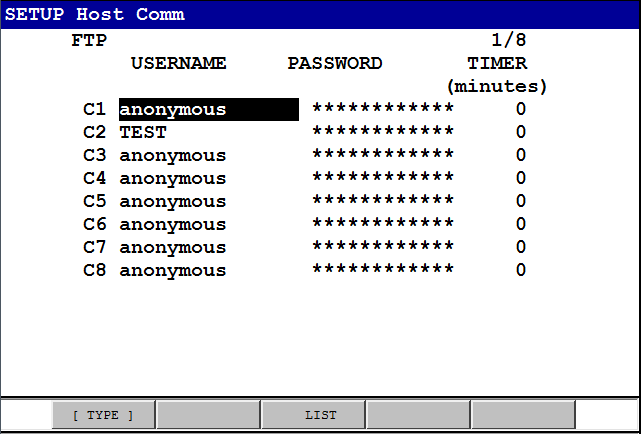
ファナックのFTPサーバーのセットアップ
ファナックのFTPサーバーは、最近のファナックのコントローラではデフォルトで有効になっています。
メニューでFTP 認証情報を検証できます:
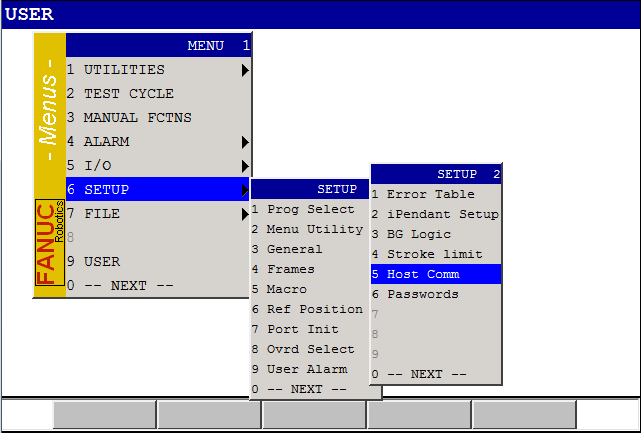
1.セットアップ➔ホスト通信
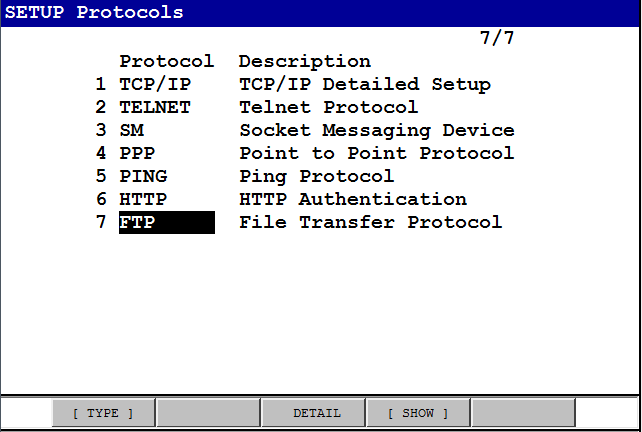
2.FTPを選択
匿名ユーザー名が表示された場合は、認証情報なしでFTP接続できる可能性があります。
ファナック用RoboDKドライバ
RoboDKとファナックのロボットコントローラの接続を確立し、RoboDKを使って接続されたPCからロボットを自動的に動かすことができます。
これにより、RoboDK Run on robot オプションを使用してオンラインプログラミングやデバッグを行うことができます。接続は標準的なイーサネット接続(TCP/IP)で行うことができます。
ロボットドライバーはオフラインプログラミング(プログラムを生成し、ロボットに転送して実行する)の代替手段を提供します。ロボットドライバーを使用すると、ロボット上で直接シミュレーションを実行することができます(オンラインプログラミング)。詳細はロボットドライバーのセクションをご覧ください。
注:この動作モードには、ファナックソフトウェアオプションのUser Socket Messaging(コントローラによりR636またはR648)とPC Interface(R641)が必要です。PCファイル(R632)を実行するには、Karelオプションも必要です。また、PCDKオプションを使用することも可能です(必ずFanucPCDKドライバを選択してください)。
ファナック用RoboDKドライバーをセットアップするには、以下の手順に従ってください:
1.カスタマーエリアからファナックのドライバプログラムファイルをダウンロードし、以下のロボットプログラムをファナックのロボットコントローラに転送します:
a.RDK_S3.PC➔ S3(ソケット通信ポート番号3 - S3)を介した通信を管理するメインプログラムです。正しいバージョンを選択してください(最新のファナックロボットコントローラではV9フォルダの下のバージョンを使用する必要があります)。
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
ロボットティーチペンダントの以下の手順に従って、ファナックロボットと RoboDK との通信の準備をしてください:
1.メニュー」-「次へ」-「システム」-「TYPE」-「変数」を選択します。
a.HOSTS_CFGを選択します。
b.3番を選択
c.SERVER_PORTを2000に設定します。
($hosts_cfg[3].$server_port = 2000)
2.メニュー-セットアップを選択
3.TYPE]-ホストコマンドを選択
4.SHOW]-サーバーを選択
5.S3」を選択-Enter。
a.プロトコル名をSMに設定
b.複数のポートが利用可能な場合は、「ポート名」でPortをP3(または対応するポート)に設定します。
c.非アクティブ時のタイムアウトを9999に設定
d.起動状態を[CHOICE] STARTに設定
e.現在の状態をSTARTED に設定します:
そのためには、[ACTION]-DEFINEを選択し、次に[ACTION]-STARTを選択します。
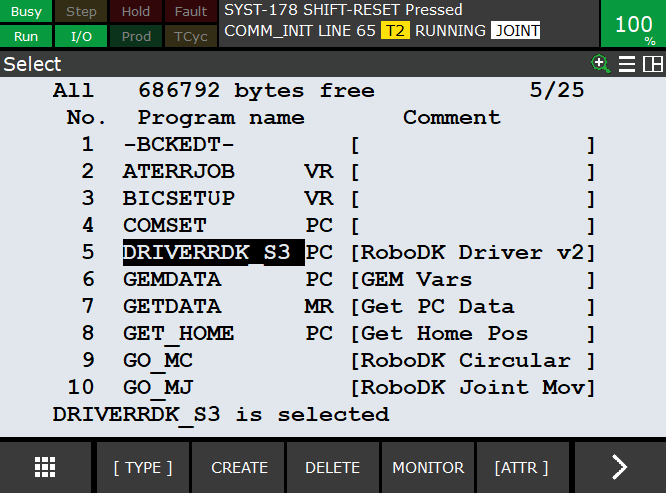
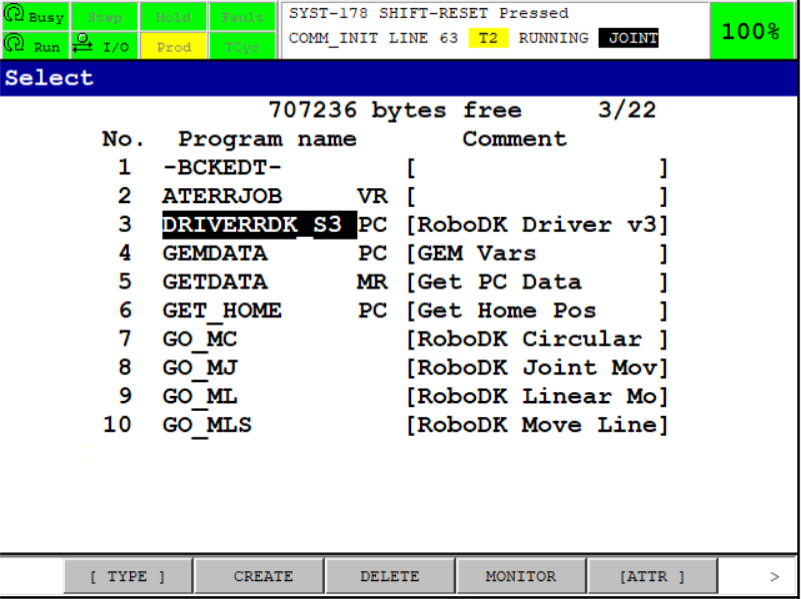
6.RDK_S3プログラムを起動します:
a.ティーチペンダントからSelectボタンを選択します。
b.RDK_S3プログラムの方へスクロールダウンしてください。
c.Enter(ティーチペンダントからボタン)を選択します。
d.シフト・リセットとシフト・フォワードを選択してプログラムを開始します。
ティーチペンダントにRUNNINGメッセージが表示されるはずです。プログラムの実行に失敗した場合は、ロボットオプション(PCインターフェースまたはユーザーソケットメッセージング)を持っていないか、PCプログラムの正しいバージョンを取っていない可能性があります。
注意:72行目で "Undefined built-in "のようなエラーメッセージが表示された場合は、ロボットコントローラにUser Socket Msgオプションがないことを意味します。
7.RoboDKでロボットのIPを指定し、Connectを選択してロボットに接続します。
注意:通信に失敗したり、ロボットがエラーモードになった場合は、RDK_S3プログラムを再起動してRoboDKから再接続してください。
注意:RoboDKでもFanucでもデフォルトでは2000番ポートが使われています。セクション1.cのポートは異なっていてもかまいませんが、RoboDKでは同じポートを指定する必要があります(ロボット接続メニューの "Robot port "セクション)。
注:ロボット通信が正しく動作するためには、プログラムRDK_S3が選択され、実行されている必要があります。S3レジスタがロボットドライバに使用できない場合は、別のSレジスタを使用する別のPCファイル(RDK_S4など)をロードしてください。
注:位置や追加のEXEがある場合、またはRoboDKのデフォルト軸マッピングが実際のロボットの軸マッピングを反映していない場合は、%appdata%RoboDK-Drivers FanucSM.exe.iniにあるファイルを編集してドライバーのマッピングを変更することができます。詳細については、最後の上級者向けセクションを参照してください。
ドライバ設定
INI ファイルを使用してドライバの追加設定を行うことができます。これにより、外部軸のマッピング方法を設定できます。
ドライバを初めて実行すると、外部軸マッピングなどのドライバの高度なパラメータを設定するためのフラグを含むファイルが生成されます。この設定ファイルの場所は、ドライバのログの先頭のLoading settingsで始まる行にあります。
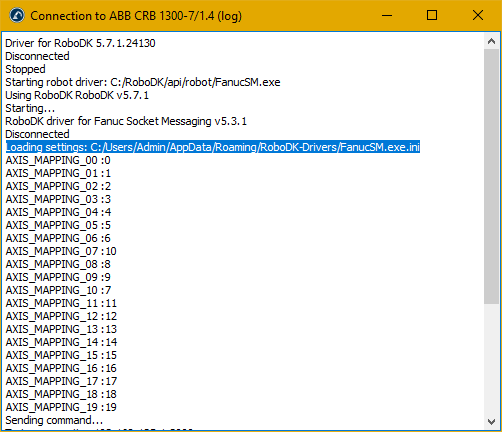
このファイルをテキストエディタで開くと、RoboDKで使用する軸とファナックのロボットコントローラ側で対応する軸のリストが表示されます。さらに、追加のデバッグ印刷を有効にしたり、使用するモーショングループの数を変更したりすることもできます。
例えばRoboDKの軸8がロボットコントローラの軸9に対応している場合、右側の数字を正しい値に変更するだけです。
軸 0 ~ 9 はモーショングループ 1 で、軸 10 ~ 17 はモーショングループ 2 です。したがって、外部軸が第 2 モーショングループにある場合、構成ファイルの軸 10 に対応します。
プログラムのコンパイル(LS対TP)
ここでは、ファナック LS と TP のプログラムファイルの違いと、RoboDK を使ってファナックロボット用のプログラムを自動的にコンパイルする方法について説明します。
ファナックロボット(TP、TPPとも呼ばれる)でロボットプログラムを実行するにはバイナリファイルが必要です。オフラインプログラミングソフトウェア(RoboDKなど)で生成されたファナックロボット用のプログラムはLSフォーマット(ASCII、テキスト可読、コンパイル不可)です。LS形式のロボットプログラムをTP形式に変換するには2つの方法があります:
1.ロボットにASCII Uploadソフトウェアオプションを搭載してください。このオプションはすでにロボットで利用可能かもしれません。このオプションが使用可能かどうかを確認する最良の方法は、ロボットにLSファイルを提供し、それが自動的にTPファイルに変換されることです。例えば、ファイルをFRディスクに置き、ティーチペンダントでLOADを選択します。
2.ロボガイドのWinOLPCツールを使ってプログラムをコンパイルします。この場合、RoboDK がインストールされているコンピュータで、ファナックのコンパイラツール "maketp.exe" を使って LS プログラムを自動的にコンパイルすることができます。このコマンドには " robot.ini " ファイルが必要です。このファイルは、ロボガイドがインストールされ、ワークステーションがコンピュータに保存されていれば、WinOLPCのsetrobot.exeユーティリティで生成できます(「ワークセル」)。
RoboguideのWinOLPCツールがデフォルトの場所にインストールされていれば、LSプログラムが生成された直後にRoboDKが自動的にTPプログラムを生成します。
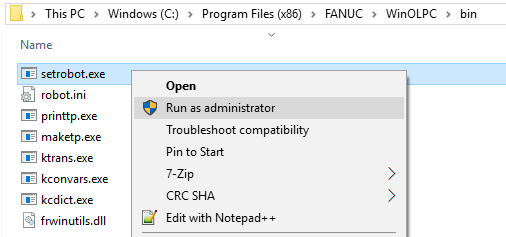
setrobot実行ファイルを用いてロボットを選択したことを確認してください。TPファイルが生成されず、ロボガイドWinOLPCがインストールされている場合は、以下の手順が必要です:
1.Windowsエクスプローラを開き、WinOLPCのインストールフォルダに移動します:
C:◆Program Files (x86)◆FANUC◆Win◆PC◆bin
2.setrobot.exeファイルを右クリックし、管理者として実行を選択します。
3.ロボットのワークセルを選択します。
または、以下のフォルダの内容をデフォルトフォルダからコピーすることもできます:
C:◆Program Files (x86)◆FANUC◆Win◆PC◆bin
をフォルダに追加します:
C:♪RoboDKapi♪Fanuc
注意:コンパイラのバージョンを尊重することが望ましいですが、必須ではありません。コンパイルは、仮想 WorkCell ロボットと実際のロボットが同じ軸数、同じオプション設定であれば動作するはずです。robot.iniファイルがあれば、ロボットを変更するたびにsetrobot.exeを使わなくてもmaketp.exeを使うことができます。
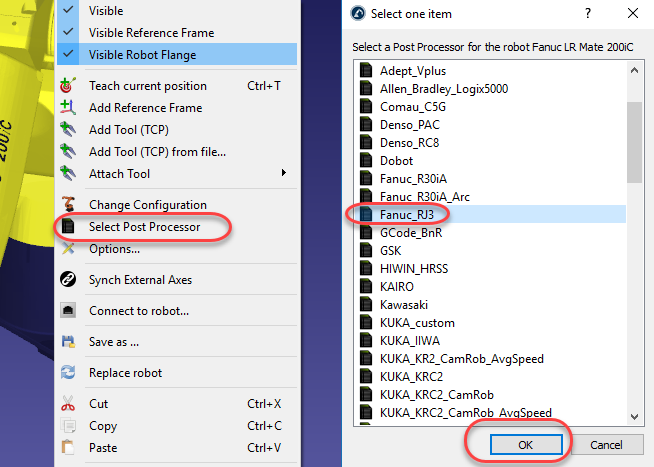
ファナックRJ3コントローラと互換性のあるポストプロセッサを選択するには、以下の手順に従ってください:
1.ロボットを右クリック
2.ポストプロセッサーを選択
3.ファナックRJ3を選択
4.プログラムの生成 (F6)
Roboguide WinOLPC をデフォルトの場所にインストールしておらず、RoboDK からプログラムを生成する際に自動的に TP ファイルを取得したい場合は、以下の手順に従ってください:
1.Program➔ Add/Edit ポストプロセッサーを選択します。
2.Fanuc RJ3(または使用したいポストプロセッサ)を選択します。すべてのポストプロセッサーはフォルダからもアクセスできます:C:/RoboDK/Posts/.また、コンパイルされたポストプロセッサを使用していないことを確認してください。
3.変数PATH_MAKE_TP(103行目あたり)を見つけて、maketp実行ファイルがあるパスを入力してください。
ファナックのロボット用RoboDKポストプロセッサは、ターンテーブルやリニア軸などの外部軸と同期した6軸ロボットの使用をサポートしています。
注:ポストプロセッサのカスタマイズに関する詳細は、「ポストプロセッサ」のセクションを参照してください。
コントローラキネマティックパラメータの更新
このセクションでは、RoboDKのキャリブレーションとパフォーマンスパッケージを使ってロボットをキャリブレーションした後、ロボットコントローラのキネマティックパラメータ(DHテーブル)を更新する方法について説明します。
コントローラの DH パラメータを変更すると、コントローラに手動で作成したすべてのプログラムに影響します。コントローラの工場出荷時の設定に戻す場合に備え、元の DH パラメータのコピーを保管してください。
1.較正ウィンドウで、較正パラメータを開きます。
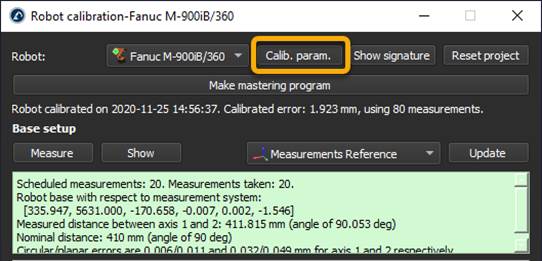
2.ジオメトリックを選択します。
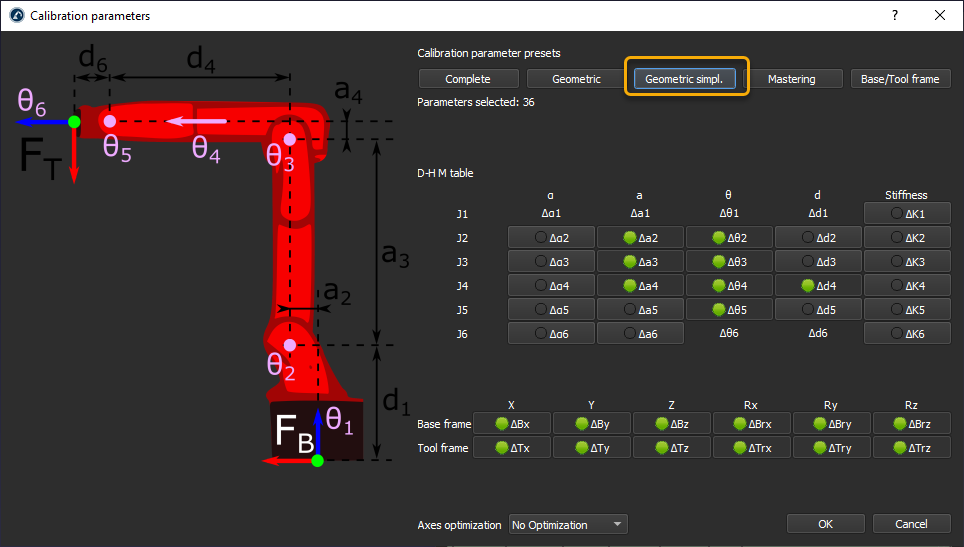
3.較正シーケンスを実行するか、既存のシーケンスを更新します。

4.ロボットの較正済みDHパラメータを取得します。RobotパネルでParametersを選択します。次にExport Tableを選択します。
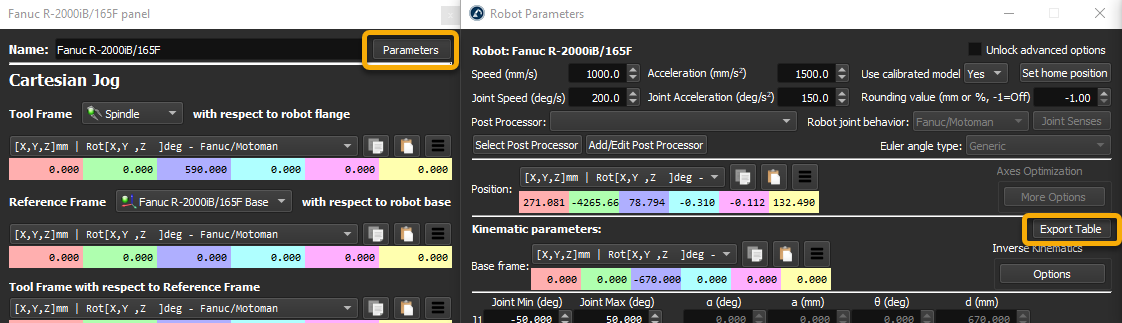
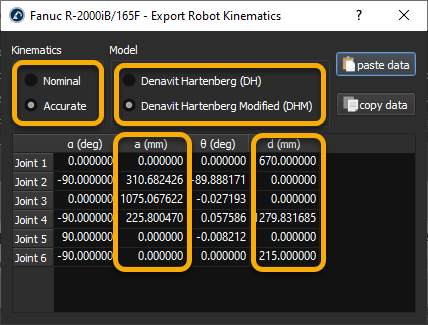
5.必ずAccurate kinematicsを使用してください。NominalはコントローラのデフォルトDHパラメータと比較するために使用できます。
6.コントローラのパラメータを変更するには、Danavit Hartenberg Modifiedモデルを使用します。
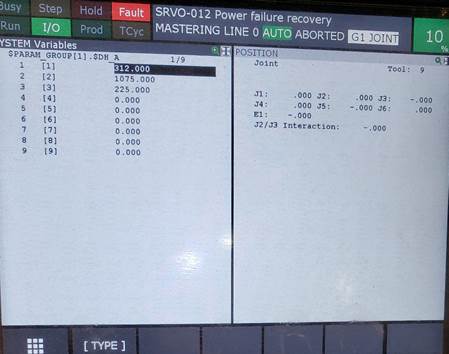
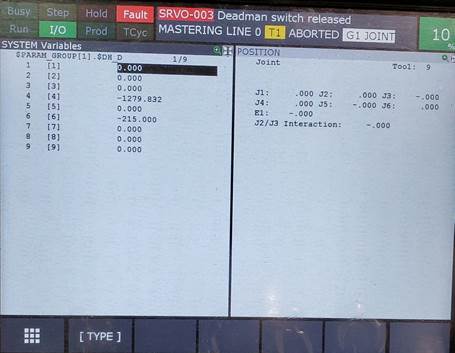
7.ロボットティーチペンダントで、システム変数→$PARAM_GROUP[1]を開きます。
8.DH_A と $DH_D パラメータを見つけてください。
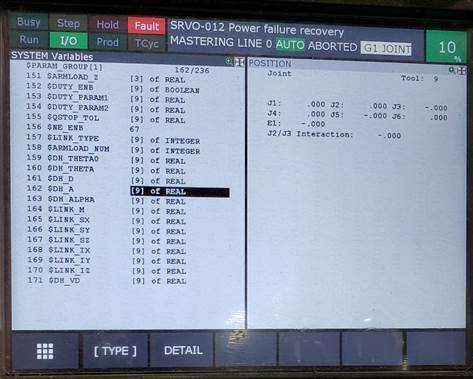
9.Export Robot Kinematicsウィンドウのa値とd値でDH値を修正します。