ハンのロボット
このセクションでは、RoboDKを使用してハンズのコントローラにプログラムを送信し、ハンズのロボットの典型的な操作の概要を説明します。
プログラムをハンズコントローラーに転送
RoboDKから生成されたロボットプログラムを手動でHanのロボットコントローラにインポートすることができます。
RoboDK プログラムをHan's Controller にインポートするには、以下の手順に従ってください:
1.ハンのコントローラーを起動し、ロボットに接続します。
2.RoboDKでインポートしたいプログラムを右クリックし、Generate Robot Program as...を選択します。
3.一つはコントローラに送信するコマンドのスクリプトで、もう一つはコントローラにアップロードする.jsonファイルです。
4.各ファイルを保存する場所を選択します。.jsonファイルはUSBディスクに保存し、プログラムとしてコントローラにインポートすることができます。
5.コントローラで、Programタブに移動します。
6.現在のプログラム」名の右側にフォルダーアイコンがあります。このアイコンを選択すると、プログラムファイルのリストが開きます。
7.リストの一番下にある「インポート」ボタンを選択します。
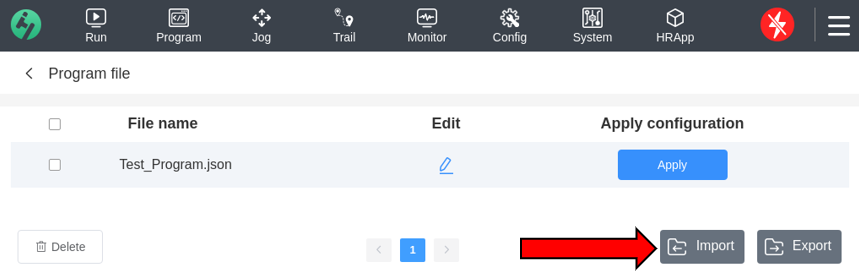
8.USB上のRoboDKが生成した.jsonファイルを探して選択します。
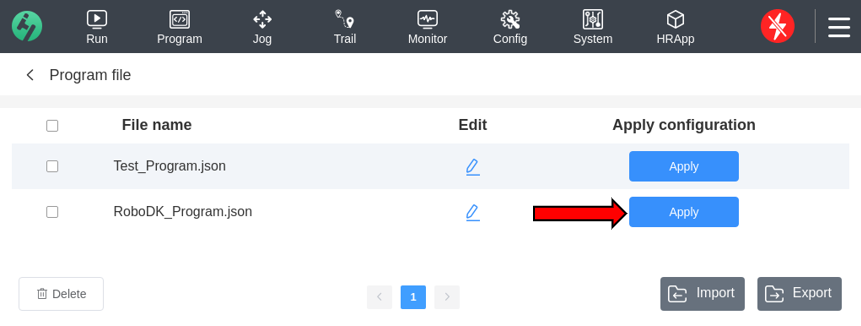
9.適用」をクリックして、インポートしたプログラムをアクティブなプログラムとして設定します。
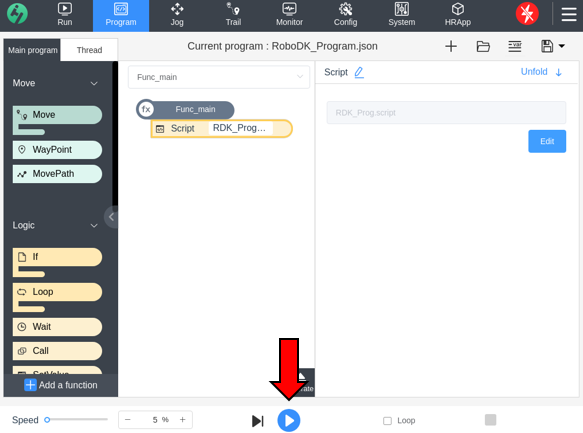
10.RoboDK プログラムはスクリプトを呼び出す関数としてインポートされます。
11.青いスタートボタンを選択し、ロボット上でプログラムの実行を開始します。