ハンファ ロボット
RoboDKはハンファのすべてのロボットコントローラに対応しています。Hanwha用のシミュレーションやロボットプログラムを作成したり、ドライバを使ってRoboDKから実際のHanwhaロボットを動かすこともできます。
注:ハンファロボットのサポートは、Rodiソフトウェアバージョン2.001.003.012以上の場合に提供されます。Hanwhaプラグイン用ドライバとRoboDKについてはお問い合わせください。
注:ドライバを使用しなくても、オフラインでプログラムを生成することができます。
ハンファ用RoboDKドライバー
ロボットドライバーはオフラインプログラミングに代わるものです。Hanwhaのドライバを使えば、RoboDKから直接プログラムをシミュレーションすることができます(オンラインプログラミング)。詳しくはロボットドライバーのセクションをご覧ください。
以下の手順に従って、RoboDK をハンファロボット用に設定してください。
ステップ1.ロボットIPアドレスの設定
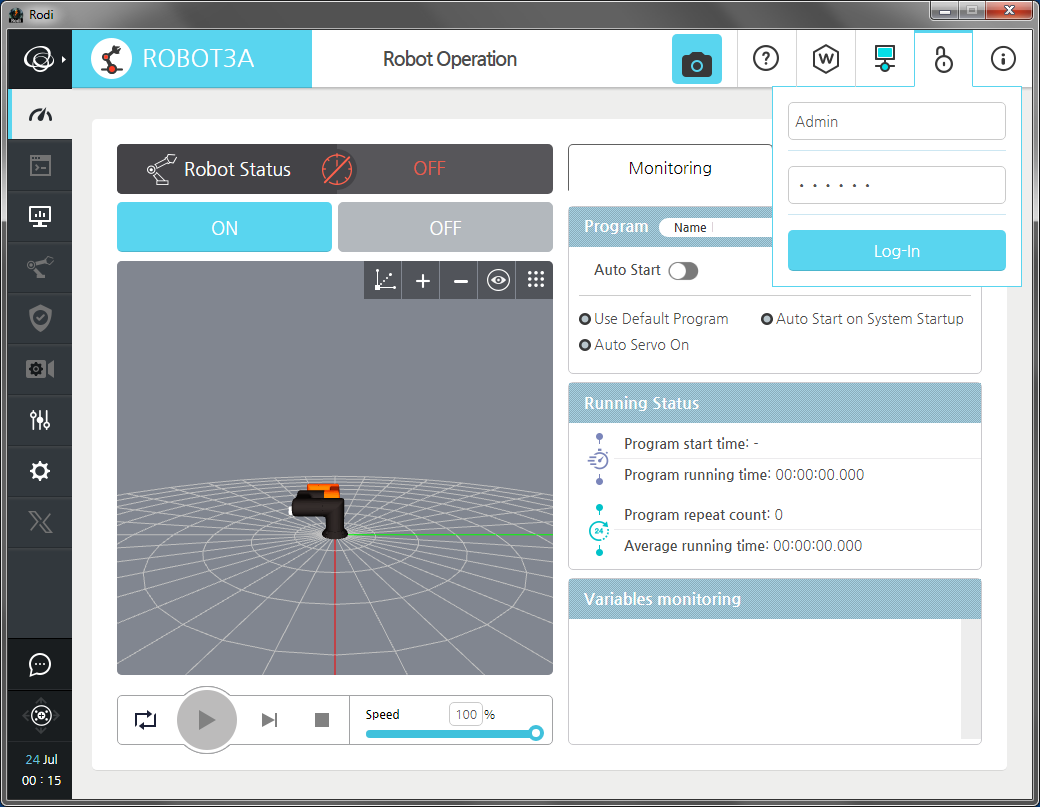
1.管理者としてログイン
注: 制御システムはデフォルトで以下のアカウントを使用します: パスワード 170502 でログイン Admin。またはパスワード hcr5 の login user。ユーザーアカウントはデフォルトで管理者権限を持っています。
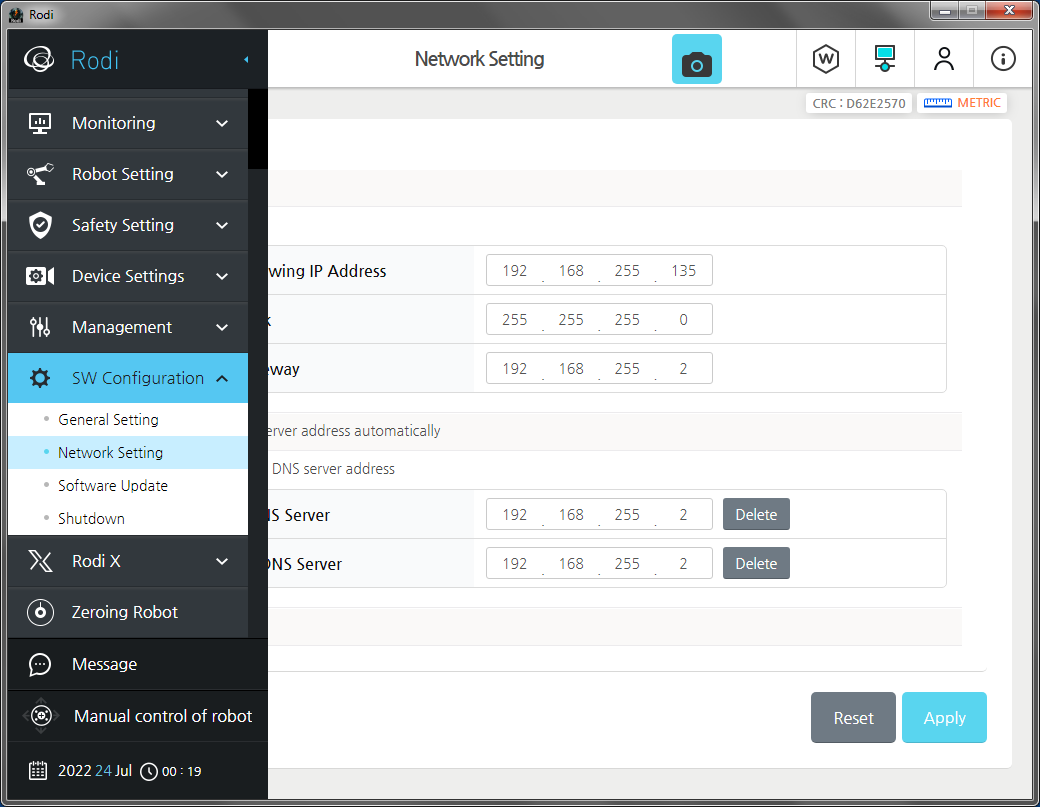
2.SW Configuration⇒ Network Settingを開き、ローカルネットワークのパラメータ、特にIPアドレスとサブネットマスクを入力します。Apply(適用)」をクリックし、システムから再起動を求められたら同意します。
ステップ2.RoboDKコネクタプラグインのインストール
1.管理者としてログイン
2.RoboDK.asarファイルの入ったUSBメモリーを用意し、ロボットコントローラまたはティーチングペンダントに差し込みます。
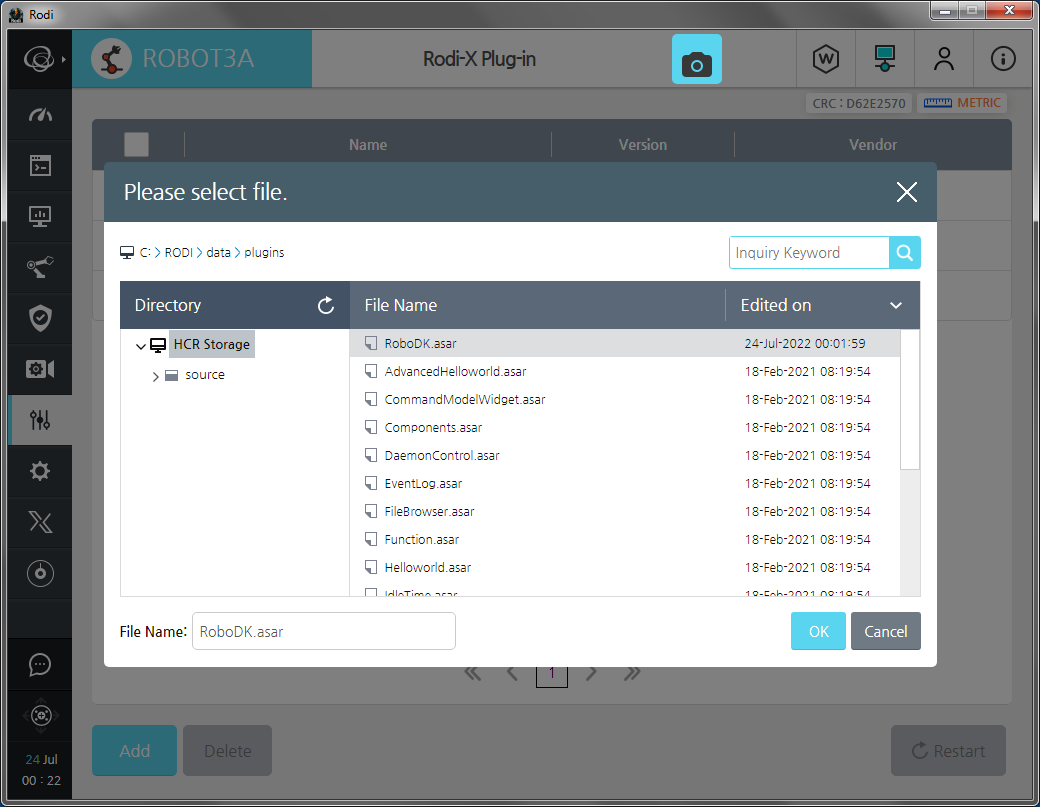
3.Management⇒ Rodi-X Plug-in を開き、Add ボタンをクリックして Select File ダイアログを開きます。
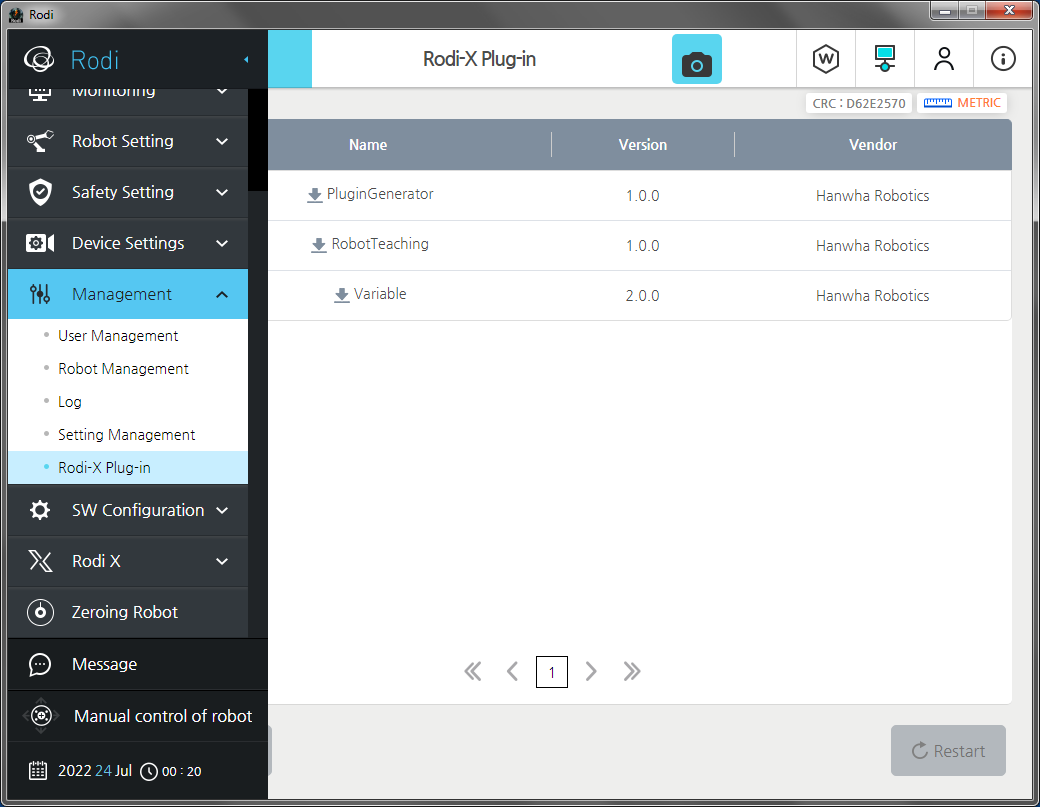
4.RoboDK.asarを選択してOKをクリックします。
5.再起動ボタンを押してください。
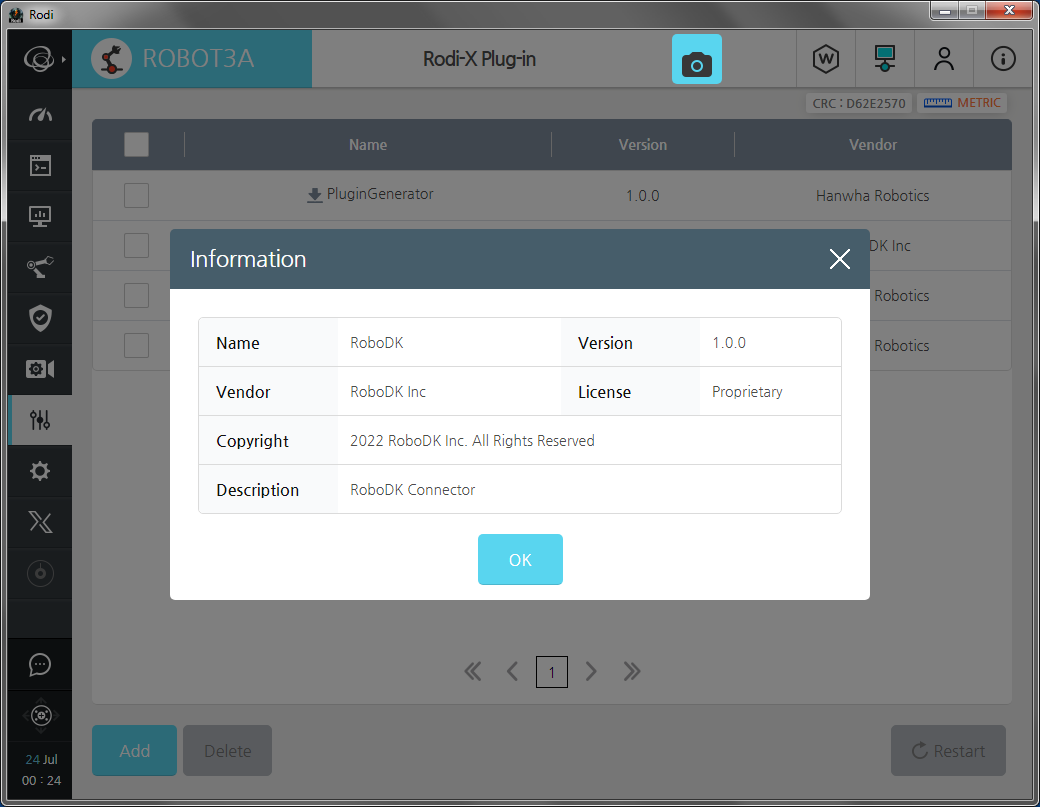
6.リロードすると、プラグインに関する情報が表示されます。
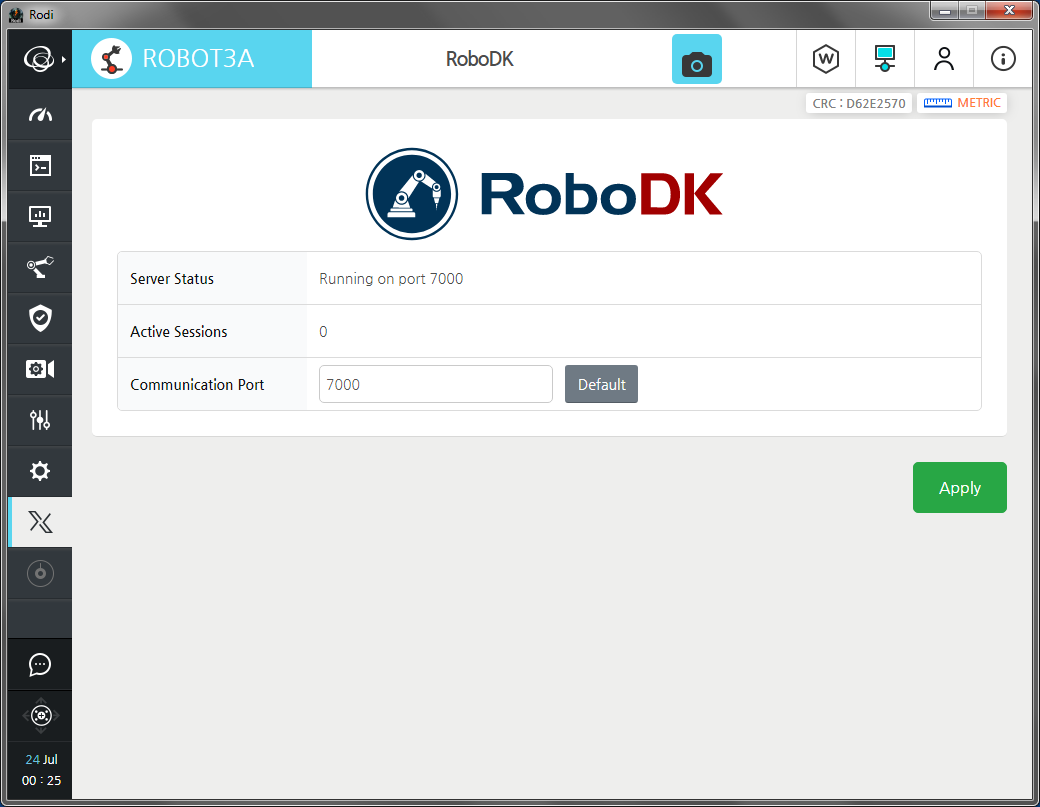
7.Rodi X⇒ RoboDK を開き、Server Status フィールドにエラーメッセージがないことを確認します。もし TCP 7000 ポートが他のアプリケーションで使用されているようであれば、Communication Port フィールドに別の値を入力して Apply をクリックすることで変更できます。
8.これでロボットは遠隔操作の準備が整いました。
ステップ3.RoboDK接続の設定
1.RoboDKプロジェクトを立ち上げ、その中にハンファロボットを1台配置します。例えば、HCR-3です。
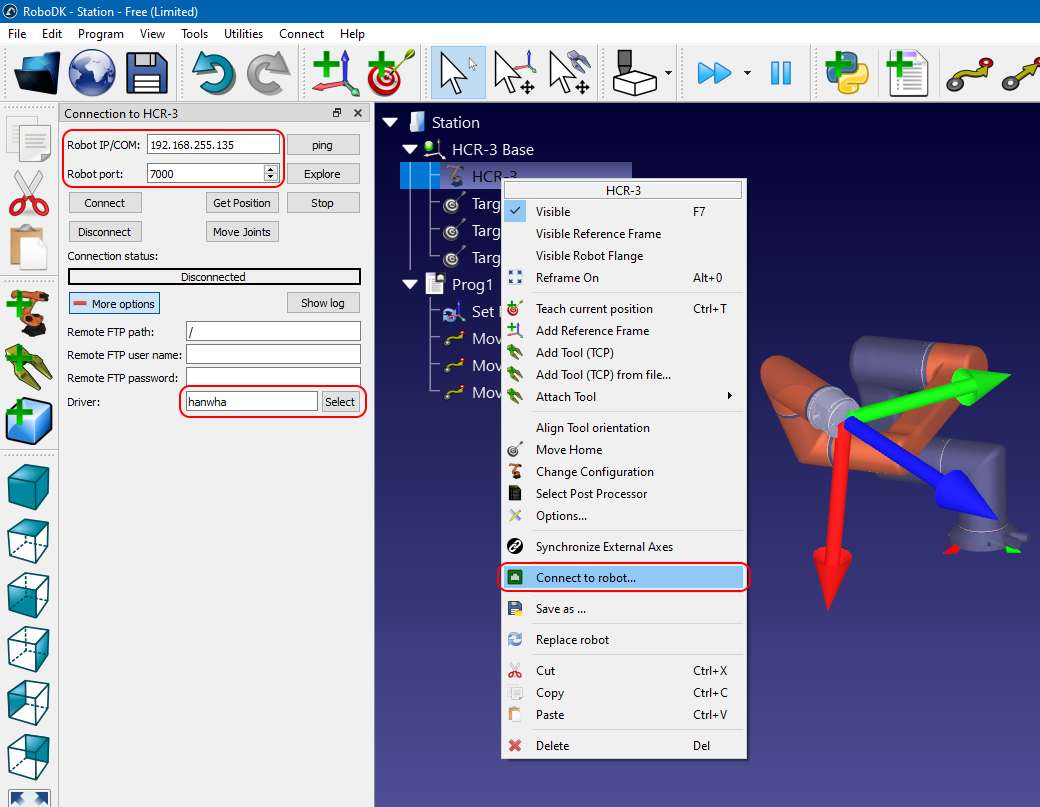
2.プロジェクトツリーでロボットを右クリックし、Connect to robot...を選択します。
3.Connection to HCR-3ウィンドウで、Robot IP/COMとRobot portフィールドに入力します(ロボットのIPアドレスとRoboDKプラグインのポート番号を使用します)。
4.同じウィンドウで、[More options]ボタンをクリックし、[Driver]フィールドに「Hanwha」と入力します(または、[Select]ボタンを使用してリストから適切なドライバを選択します)。
5.接続ボタンをクリックし、すべての設定が正しければ、接続ステータスバーに「準備完了」と表示されます。
ヒントGet Position と Move Joints ボタンを押してシステムの動作を確認してください。サーボドライブがオンになっている場合、Move Jointsボタンを押すとロボットがRoboDKで設定した位置に動き出しますので注意してください。