JAKA
RoboDKとJAKAロボットの接続を確立し、接続されたPCからRoboDKを使ってロボットを自動的に動かすことができます。これにより、RoboDKのRun on robotオプションを使用してオンラインプログラミングやデバッグを行うことができます。接続は標準的なイーサネット接続(TCP/IP)で行うことができます。
重要:JAKAドライバを使用するには、Visual Studio 2013用のVisual C++ 再頒布可能パッケージがコンピュータにインストールされている必要があります。Microsoft社からダウンロードし、インストールしてください。
以下の手順に従って、JAKAオンラインプログラミング用のRoboDKドライバをセットアップしてください:
1.JAKA Zuアプリを起動し、JAKA Zuアプリでロボットに接続します。
2.JAKA Zuロボットの電源を入れ、有効にしてください。
3.RoboDKのツールバーで、Connect➔ Connect Robotを選択します。
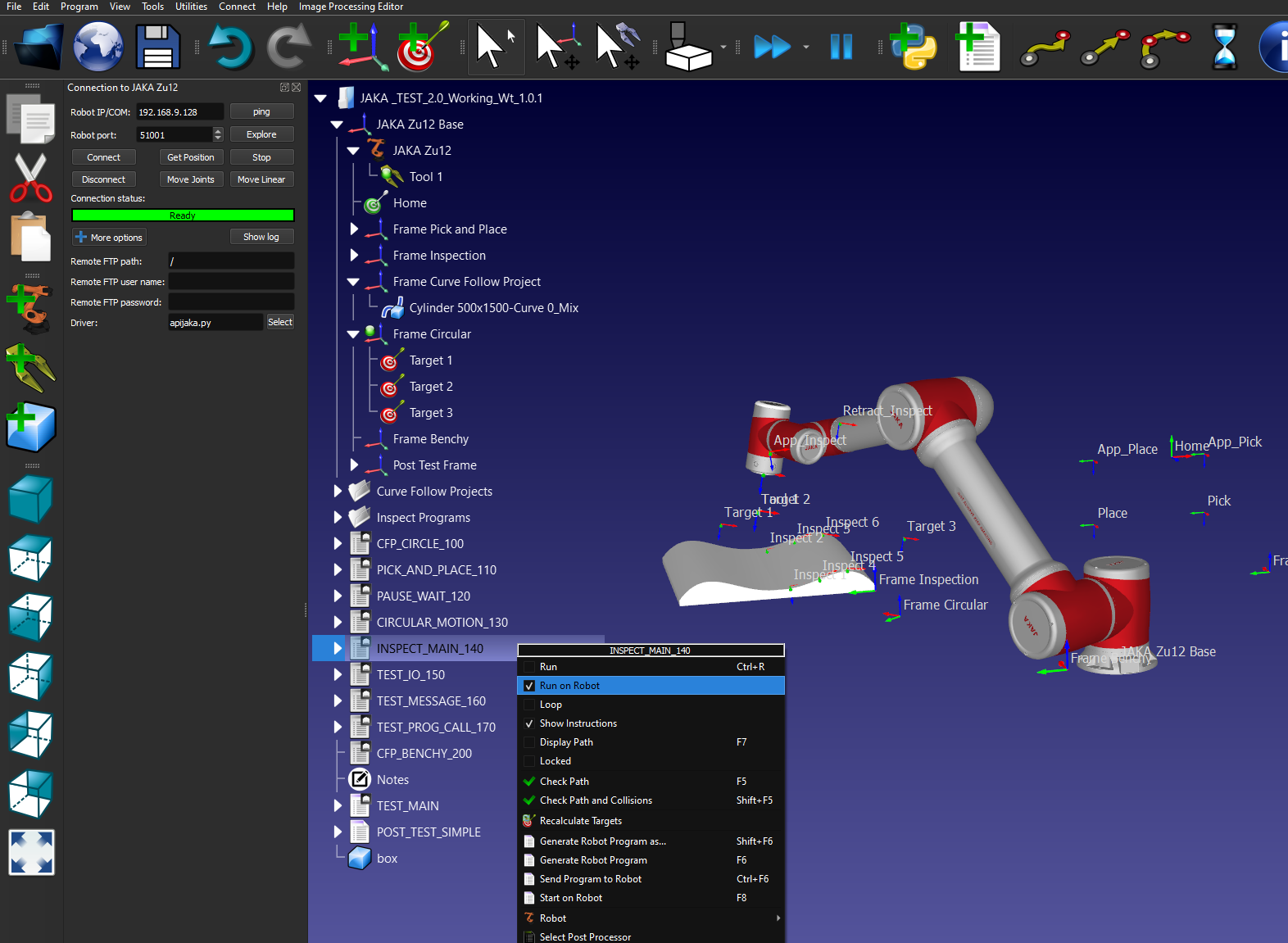
4.More options "でJAKAドライバ:apijaka.pyを選択します。
5.ロボットのIPとポートを使ってRoboDKに接続します。
6.RoboDKから直接JAKAロボットを動かすことができます。
a.RoboDKでロボットをターゲットに移動させるには、ステーションツリーでターゲットをダブルクリックし、接続インターフェースの「ジョイント移動」または「リニア移動」ボタンを選択します。
b.ドライバを使ってロボット上でプログラムを実行するには、目的のプログラムを右クリックし、"Run on Robot "オプションを選択します。その後、プログラムをダブルクリックしてロボット上で実行します。