JAKAロボット
このセクションでは、RoboDKソフトウェアを使用してJAKAロボットコントローラーアプリにプログラムを送信するJAKAロボットの典型的な操作の概要を説明します。
利用可能な機能は次のとおりです:
1.ドライバーと "Run on Robot "を使用してリアルタイムでロボットを制御します。
2.ポストプロセッサーを使用してJAKA Zuアプリにプログラムを送信し、「ロボットにプログラムを送信」するか、RoboDKで生成された.zipファイルをインポートしてJAKA Zuにプログラムを手動でロードします。
RoboDKでJAKAコントローラにプログラムを送信
RoboDKのシミュレーションから数回クリックするだけで、JAKAのロボットコントローラにプログラムを送ることができます。
RoboDKからJAKA Zuにプログラムをロードするには、以下の手順に従ってください:
1.JAKA Zuアプリを起動し、JAKA Zuアプリでロボットに接続します。
2.JAKA Zuロボットの電源を入れ、有効にしてください。
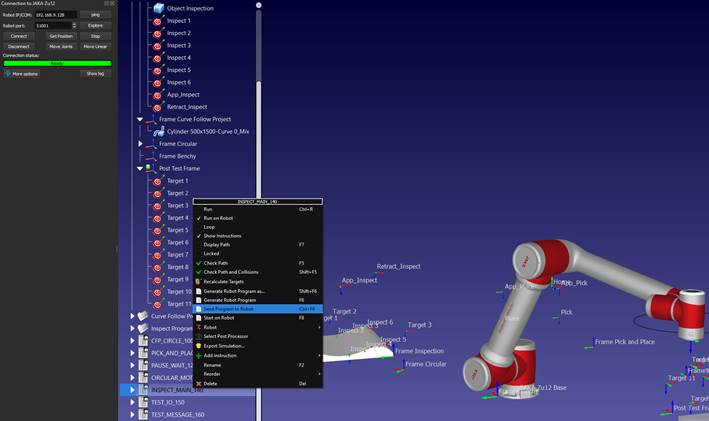
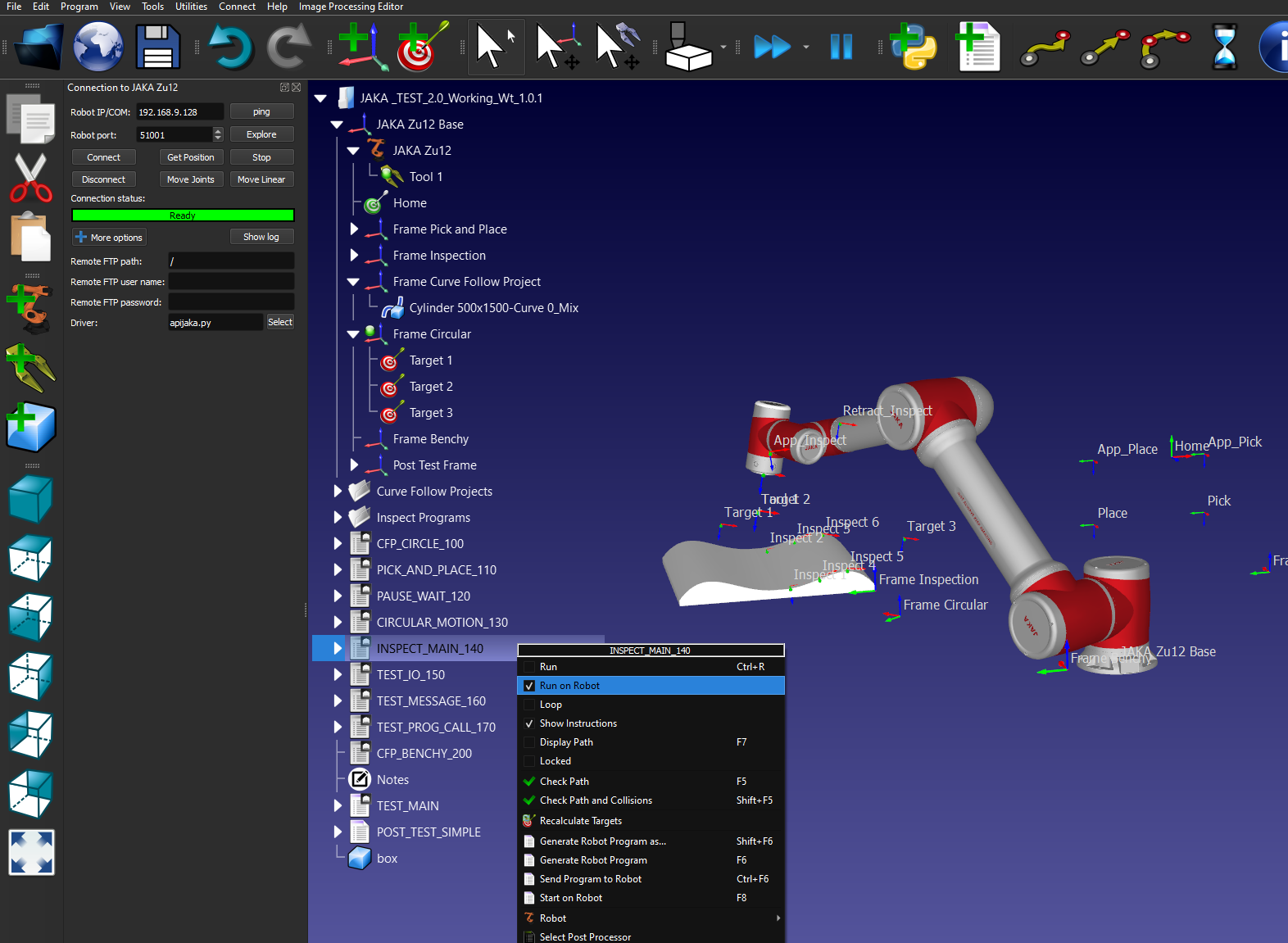
3.RoboDKのツールバーで、Connect➔ Connect Robotを選択します。
その他のオプションで、JAKAドライバが選択されていることを確認します。
4.ロボットのIPとポートを使ってRoboDKに接続します。
5.JAKA Zuに送信したいプログラムを右クリックし、「プログラムをロボットに送信」を選択します。
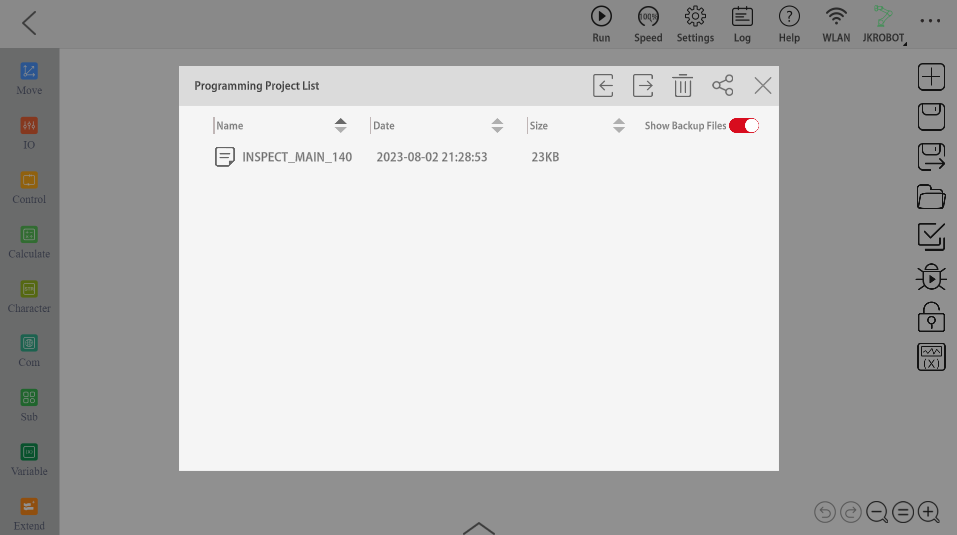
6.JAKA Zuで、プログラミング制御タブに移動します。
7.フォルダアイコンをクリックしてプログラミングプロジェクトリストを開き、インポートしたプログラムを選択します。
重要一度にアップロードできるプログラムは 1 つだけです。プログラムにサブプログラムが含まれている場合は、RoboDK のツール➔オプション➔プログラムで "インラインサブプログラム" オプションが有効になっていることを確認してください。
JAKAコントローラへのプログラムの手動インポート
RoboDKから生成されたロボットプログラムをJAKAロボットコントローラに手動でインポートすることができます。
RoboDK プログラムをJAKA Zu にインポートするには、以下の手順に従ってください:
1.JAKA Zuアプリを起動し、JAKA Zuアプリでロボットに接続します。
2.JAKA Zuロボットの電源を入れ、有効にしてください。
3.JAKA Zuにインポートしたいプログラムを右クリックし、「Generate Robot Program as...」を選択します。
4.プログラムを保存する場所を選択します。
5.JAKA Zuで、プログラミング制御タブに移動します。
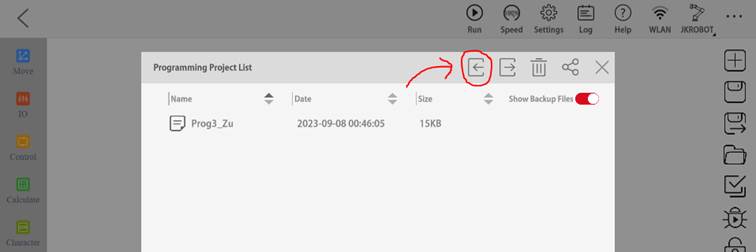
6.フォルダアイコンをクリックしてプログラミングプロジェクトリストを開き、インポートアイコンをクリックします。
7.RoboDKが生成した.zipファイルを探して選択します。
8.プログラミング・プロジェクト・リストを開き、インポートしたプログラムを選択します。
ロボット参照フレームの手動置換
以下の手順は、JAKA Zuアプリでロボット基準フレームを手動で設定する方法を示しています。
まず、JAKA Zuのカスタムフレームを作成します:
1.JAKA Zuの設定➔運用設定➔ユーザー座標系に移動します。
2.編集ボタンをクリックして、カスタムフレームのX、Y、Z、RX、RY、RZ値を設定します。
3.確定を選択すると、JAKA Zuにフレームが保存されます。
そして、インポートしたフレームをJAKA Zuのフレームに置き換えてください:
4.JAKA Zuにプログラムを送る」に記載されている手順に従ってください。
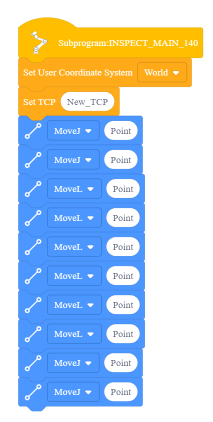
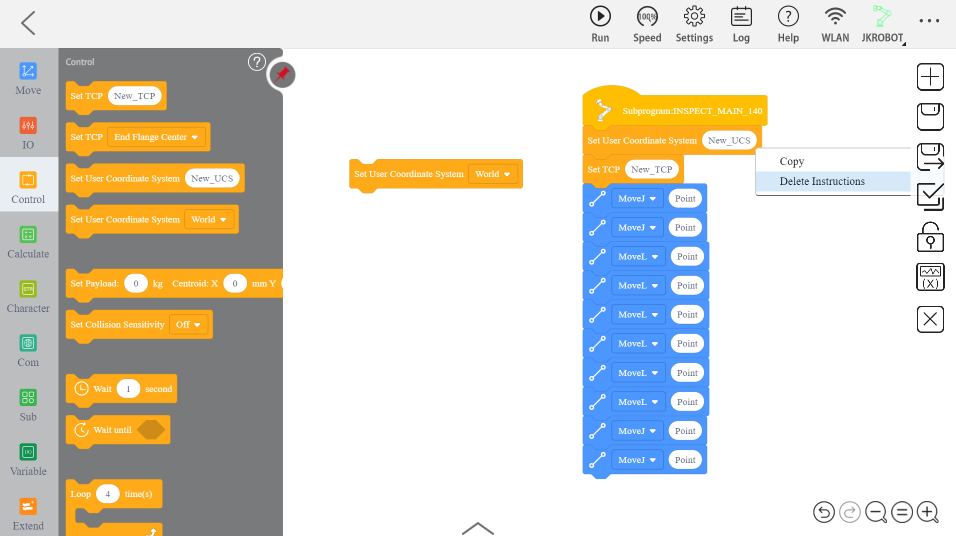
5.サイドバーのコントロールタブを開き、ドロップダウンボックスのある "ユーザー座標系を設定 "タイルを見つけます。
6.自動的にインポートされた "New_UCS "タイルを右クリックして削除を選択して削除します。
7.削除したタイルを"Set User Coordinate System" タイルに置き換え、ドロップダウンからカスタムフレームを選択します。
ロボットツールの手動交換(TCP)
JAKA ZuアプリからTCPを手動で設定することもできます。以下の手順で行います。
まず、JAKA Zuのカスタムツールを作成します:
1.JAKA Zu の設定➔運用設定➔ TCP 設定に移動します。
2.編集ボタンをクリックして、カスタム TCP の X、Y、Z、RX、RY、RZ 値を設定します。
3.確認」を選択し、JAKA Zuにツールを保存します。
次に、インポートしたツールをJAKA Zuツールに置き換えます:
4.JAKA Zuにプログラムを送る」に記載されている手順に従ってください。
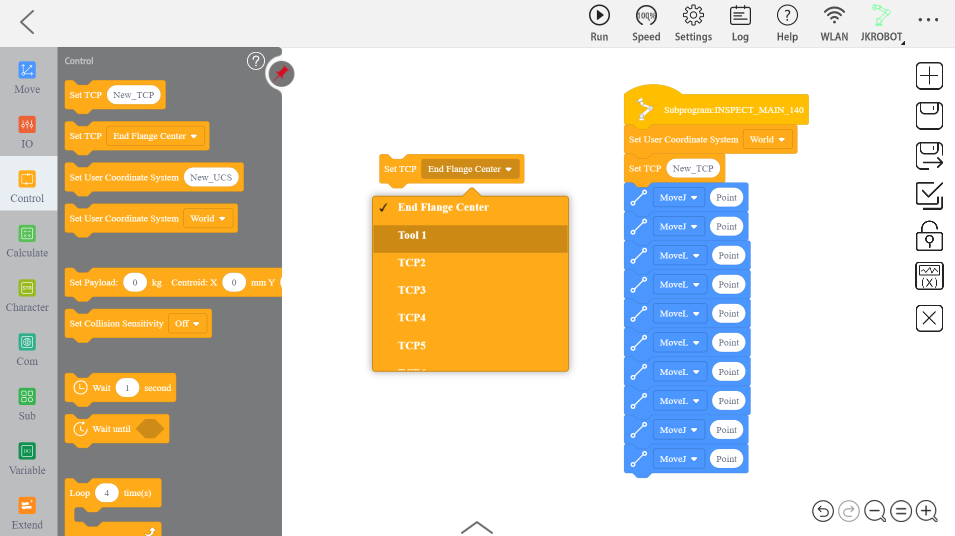
5.サイドバーの[コントロール]タブを開き、ドロップダウンボックスのある[TCPの設定]タイルを見つけます。
6.自動的にインポートされた "New_TCP "タイルを右クリックして削除を選択し、削除します。
7.削除したタイルを「Set TCP」ドロップダウン・タイルに置き換えます。
8.ドロップダウンメニューから目的のツールを選択します。
ロボットプログラムの開始
JAKAロボットでロボットプログラムを開始するには、以下の手順に従ってください。
1.JAKA Zuにプログラムを送る」に記載されている手順に従ってください。
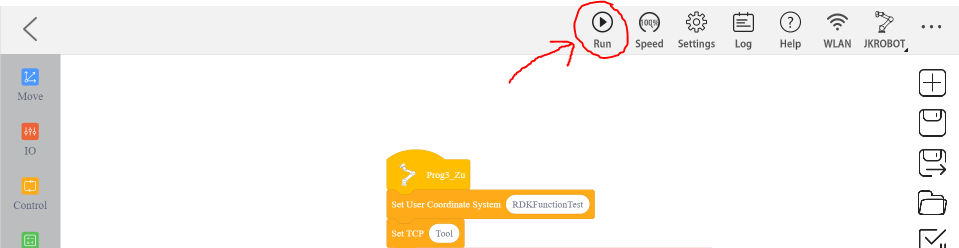
2.上部のツールバーで「実行」を選択します。
注意:プログラムを開始する前に、ロボットをJAKA Zuの初期位置に移動させる必要がある場合があります。その場合は、ロボットが初期位置に到達するまで「MoveJでポイントへ移動」ボタンを左クリックしたままにしてください。確認後、再度プログラムを実行してください。
JAKA用RoboDKドライバー
RoboDKとJAKAロボットの接続を確立し、接続されたPCからRoboDKを使ってロボットを自動的に動かすことができます。これにより、RoboDKのRun on robotオプションを使用してオンラインプログラミングやデバッグを行うことができます。接続は標準的なイーサネット接続(TCP/IP)で行うことができます。
以下の手順に従って、JAKAオンラインプログラミング用のRoboDKドライバをセットアップしてください:
1.JAKA Zuアプリを起動し、JAKA Zuアプリでロボットに接続します。
2.JAKA Zuロボットの電源を入れ、有効にしてください。
3.RoboDKのツールバーで、Connect➔ Connect Robotを選択します。
4.More options "でJAKAドライバ:apijaka.pyを選択します。
5.ロボットのIPとポートを使ってRoboDKに接続します。
6.RoboDKから直接JAKAロボットを動かすことができます。
a.RoboDKでロボットをターゲットに移動させるには、ステーションツリーでターゲットをダブルクリックし、接続インターフェースの「ジョイント移動」または「リニア移動」ボタンを選択します。
b.ドライバを使ってロボット上でプログラムを実行するには、目的のプログラムを右クリックし、"Run on Robot "オプションを選択します。その後、プログラムをダブルクリックしてロボット上で実行します。
JAKAバーチャルシミュレータからIPアドレスを取得
仮想シミュレータからIPアドレスを取得するには、以下のロボットアドレスフィールドにあるBase64文字列をデコードする必要があります:
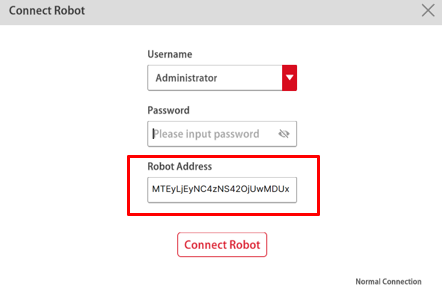
https://www.base64decode.net/ などのツールを使って、ロボットアドレスからロボットIPとポートを取得することができます。


この例では、IPは112.124.35.6、ポートは50051です。