RoboDK
ロボットドライバーは、オフラインプログラミング(プログラムを生成し、ロボットに転送して実行する方法)に代わる方法を提供します。RoboDKから直接ロボット上でシミュレーションを実行することができます(オンラインプログラミング)。ドライバについての詳細はロボットドライバのセクションをご覧ください。
以下の手順に従ってRoboDKからロボットに接続してください:
1.RoboDKでロボットを右クリックします。
2.選択してください:
3.ロボットのIPを入力してください。
4.接続を選択します。
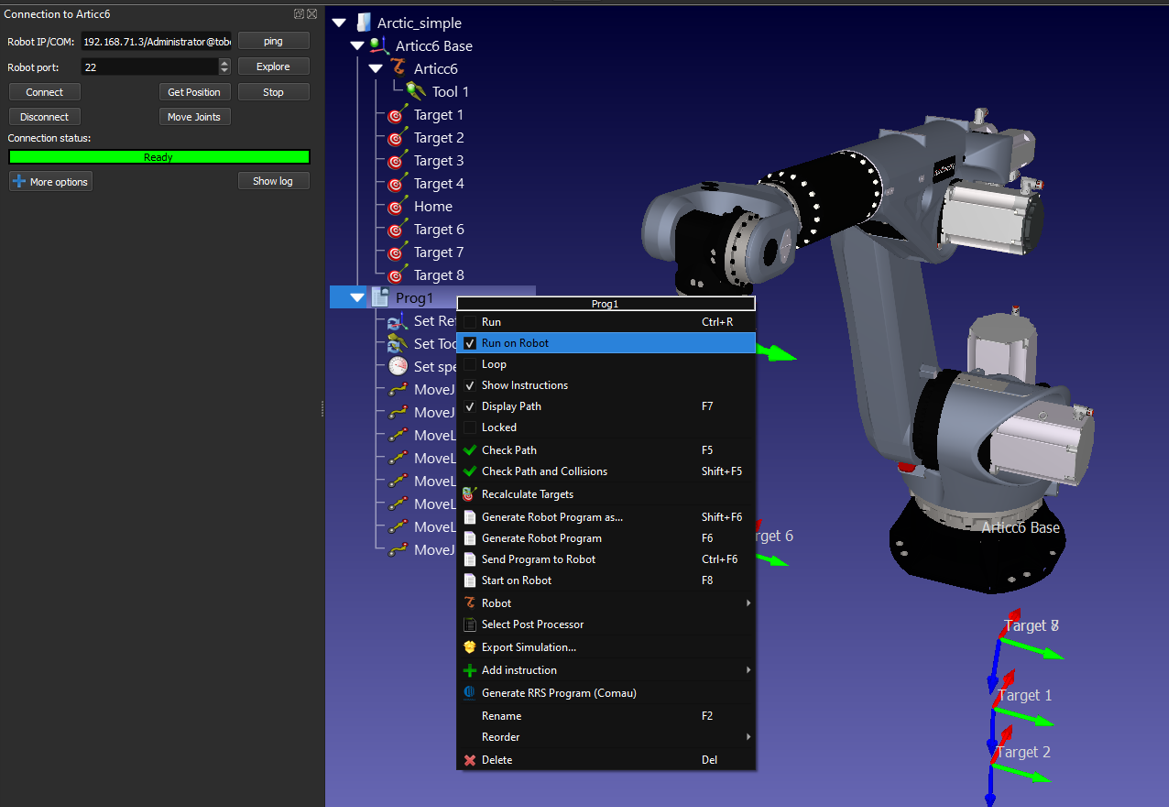
接続に成功すると、Readyという緑色のメッセージが表示されるはずです。そうでない場合は、IP、ユーザー名、パスワードが正しいことを確認してください。また、RoboDKのIPアドレスは前のセクションで述べたように正しくフォーマットしてください(127.0.0.1/ユーザ名@パスワード)。
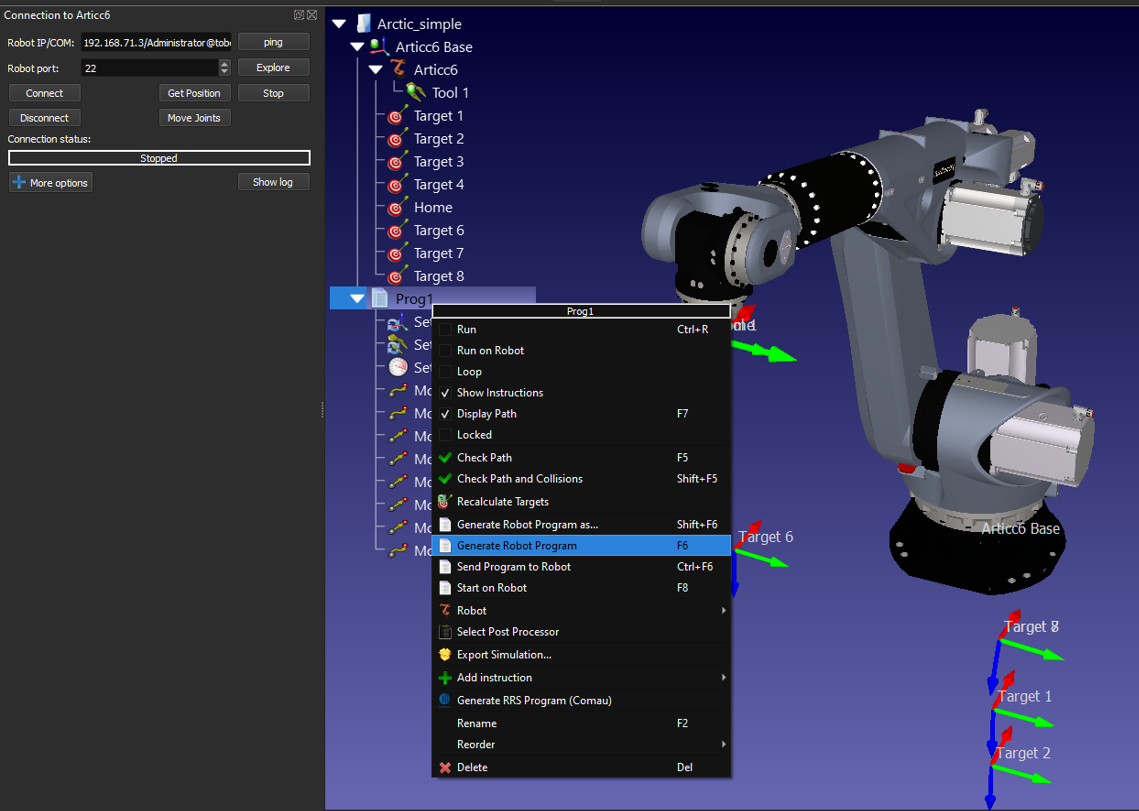
注:接続に失敗した場合、コンピュータとロボット間のネットワーク接続が正しく確立されていることを確認してください。コンピュータのIPがロボットと同じネットワーク内にあることを確認してください。Windowsでは管理者権限が必要です。詳しくはドライバのトラブルシュートのセクションを参照してください。
ロボットの移動は、接続メニューからGet robot jointsを選択し、ロボットをジョグし、Move Jointsをクリックして接続メニューからロボットを移動します。
PCからロボットに直接プログラムを実行するには、プログラムのRun on robot有効にする必要があります。以下のステップでRun on robotオプションを有効にする方法を説明します:
a.プログラム(この例ではPrint3D)を右クリックします。
b.ロボット上で実行を選択
c.プログラムをダブルクリックして起動します(または右クリックして「ファイル名を指定して実行」を選択します)。
このようなロボットのプログラミング方法は、デバッグ目的には便利ですが、ロボットのプログラムを展開するには、前節で述べたようにオフラインでプログラムを生成する方がよいでしょう。
Run on robotオプションをチェックすると、プログラムをダブルクリック(または右クリック→Runを選択)するたびに実際のロボットに接続されます。
これらの操作はRoboDK APIからも利用でき、ロボットプログラミングを他のアプリケーションと統合することができます。APIはPythonやC#などのプログラミング言語で利用できます。